Kaszaloty spermacetowe i ich śmiertelne dźwięki
 547
547
 97
97
 88
88
547
97
88
Wiedza
2 l
227

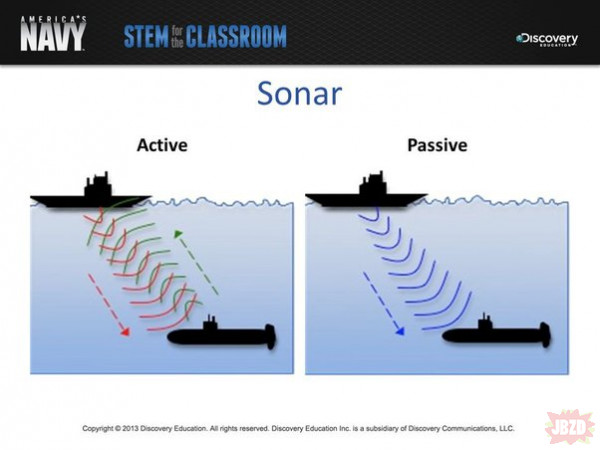
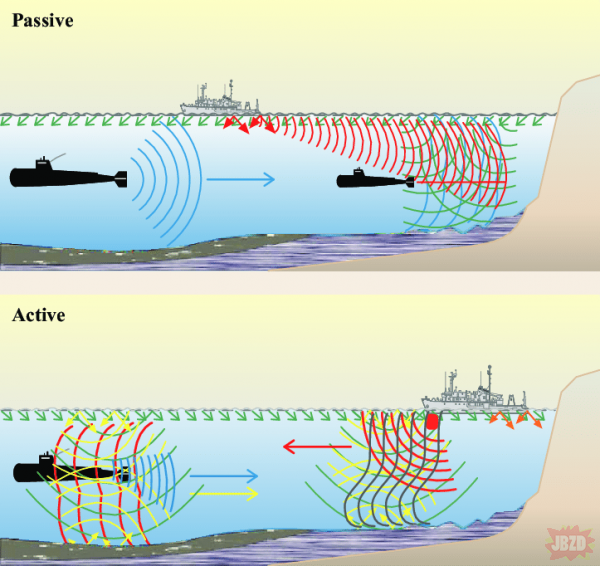
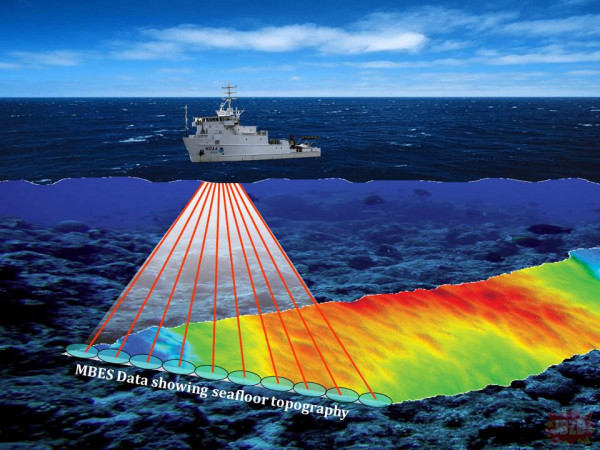
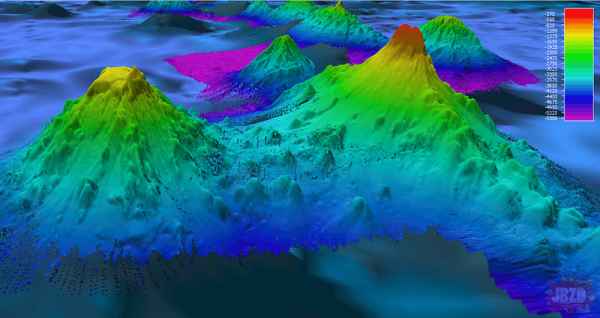
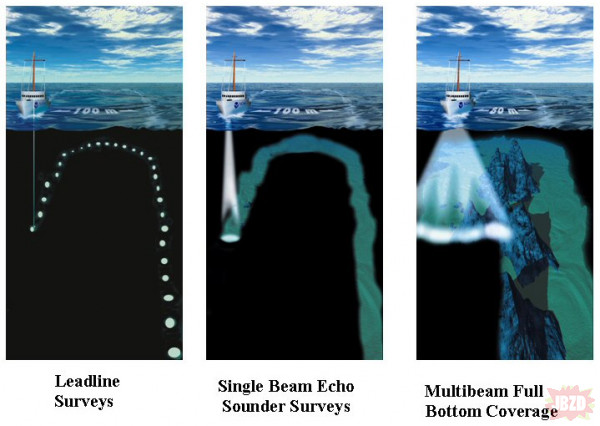
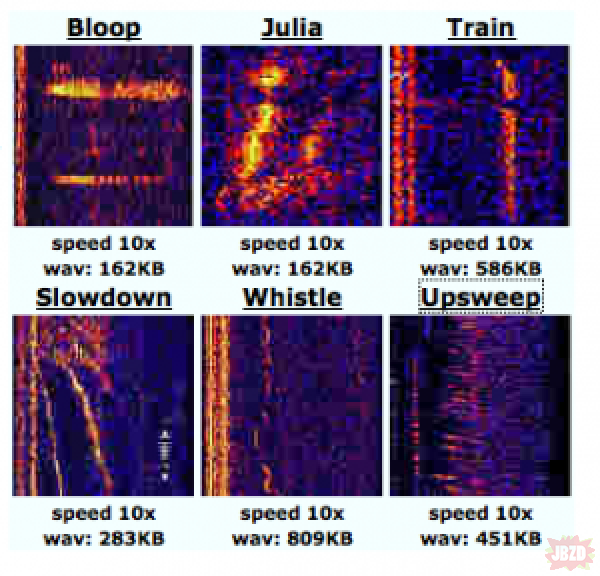
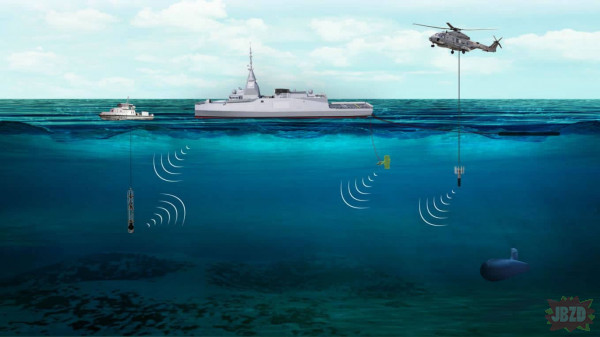
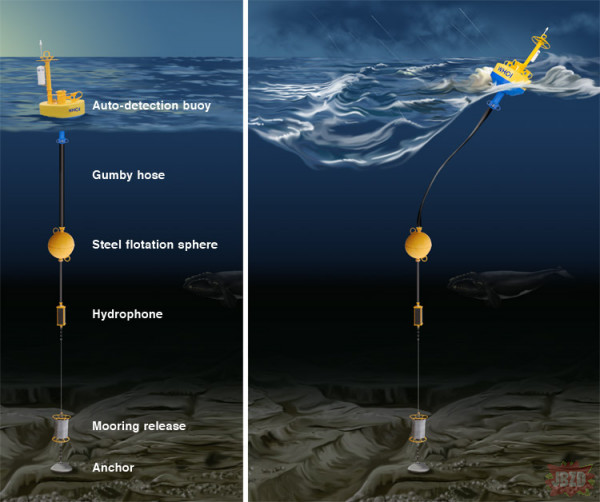
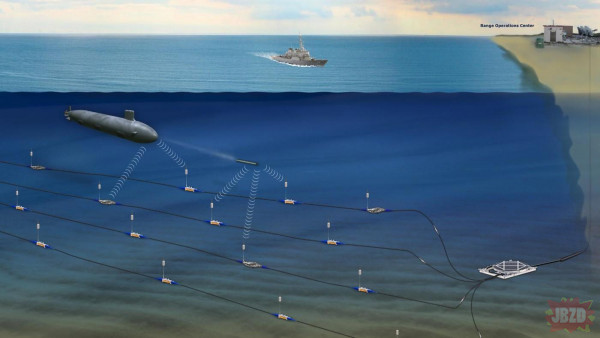
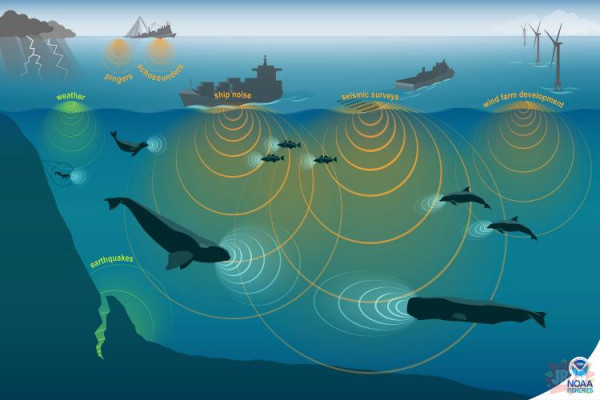
Dzidki, ocean może wydawać się z powozu miejscem, w którym panuje cisza, jednak wcale tak nie jest, a wręcz przeciwnie – akustyka oceanu jest bardzo bogata i różnorodna, można rzec, że w oceanie panuje ogromny hałas. Rejestrowany jest nie tylko przez systemy SONAR z wykorzystaniem hydrofonów, ale niekiedy zdarza się również, że żyjące w oceanie zwierzęta czy różne zjawiska są słyszane przez człowieka bez jakiejkolwiek pomocy. Wieloryby, wybuchy podwodnych wulkanów, płynące łodzie podwodne i batyskafy, statki, podwodne torpedy i drony, spadające lodowce, ocierające się o siebie ruchy płyt tektonicznych trąby wodne i tsunami, wiry wodne, wybuchy podwodnych min czy nawet testy broni nuklearnej przez jednostki wojskowe różnych krajów (tak, przeprowadza się je zazwyczaj na oceanie, a nie na lądzie) tworzą niezwykle donośną i bogatą kaskadę wszelkich dźwięków. Zarówno na lądzie, jak i w wodzie, najgłośniejszymi żyjącymi zwierzętami są kaszaloty spermacetowe. Co ciekawe, wydawane przez nie dźwięki mogą być śmiertelne.

Kaszaloty spermacetowe – Krótka charakterystyka
Największym z podrzędu zębowców są kaszaloty. Dorosłe kaszaloty spermacetowe (zwane również potwalem) osiągają długość od 15 do 20 metrów długości i osiągają wagę do około 75 ton. Głowa dorosłego osobnika osiąga aż 1/3 ich ciała, zaś pojedynczy ząb (których mają aż 50) waży około 1 kg. Zęby znajdują się jedynie w dolnej żuchwie i idealnie wpasowują się w otwory znajdujące się w górnej części szczęki. Ich ulubionym pożywieniem są kałamarnice olbrzymie (które kiedyś mogły być uznawane za Krakena) – polowanie na nie powoduje, że głowy kaszalotów pokryte są licznymi bliznami, również od ich niezwykle mocnych przyssawek. Dzioby kałamarnic olbrzymich nie mogą być przez nie strawione, dlatego zalegają w żołądku do końca życia osobnika. Rekordowa ich ilość znaleziona w żołądku jednego osobnika wynosiła ponad 18000. W pościgu za ulubionym przysmakiem mogą zanurkować na głębokość nawet 1,5 km, co czyni z nich zarazem drugimi z najgłębiej nurkujących ssaków. Kaszaloty spermacetowe rodzą tylko jedno młode naraz i samica karmi je mlekiem. Ciąża trwa ok. 14-15 miesięcy. Młode potwala zwane jest cielęciem. Co ciekawe, śpią w grupach w pozycji pionowej.
Największym z podrzędu zębowców są kaszaloty. Dorosłe kaszaloty spermacetowe (zwane również potwalem) osiągają długość od 15 do 20 metrów długości i osiągają wagę do około 75 ton. Głowa dorosłego osobnika osiąga aż 1/3 ich ciała, zaś pojedynczy ząb (których mają aż 50) waży około 1 kg. Zęby znajdują się jedynie w dolnej żuchwie i idealnie wpasowują się w otwory znajdujące się w górnej części szczęki. Ich ulubionym pożywieniem są kałamarnice olbrzymie (które kiedyś mogły być uznawane za Krakena) – polowanie na nie powoduje, że głowy kaszalotów pokryte są licznymi bliznami, również od ich niezwykle mocnych przyssawek. Dzioby kałamarnic olbrzymich nie mogą być przez nie strawione, dlatego zalegają w żołądku do końca życia osobnika. Rekordowa ich ilość znaleziona w żołądku jednego osobnika wynosiła ponad 18000. W pościgu za ulubionym przysmakiem mogą zanurkować na głębokość nawet 1,5 km, co czyni z nich zarazem drugimi z najgłębiej nurkujących ssaków. Kaszaloty spermacetowe rodzą tylko jedno młode naraz i samica karmi je mlekiem. Ciąża trwa ok. 14-15 miesięcy. Młode potwala zwane jest cielęciem. Co ciekawe, śpią w grupach w pozycji pionowej.


Kaszalory spermacetowe a wielorybnictwo
Niegdyś wykorzystywano w przemyśle kosmetycznym, przez co stanowiły spore zainteresowanie wśród wielorybników. Pozyskuje się z nich spermacet (oleistą masę znajdującą się między kośćmi ich czaszek), który wykorzystuje się do produkcji szminek i kremów oraz ambrę (masa, która powstaje jedynie w jelitach chorych lub martwych osobników), która ze względu na silny aromat o ciekawym zapachu wykorzystuje się w przemyśle perfumeryjnym – jest on niezwykle cennym surowcem, który osiąga wysokie ceny. Były głównym obiektem połowów wielorybników od XVIII do końca XIX wieku. W 1982 roku zakazano całkowicie polowania na kaszaloty spermacetowe i wpisano je do Czerwonej Księgi Gatunków Zagrożonych, gdzie przypisano je do kategorii VU (czyli „narażony na wyginięcie”).
Niegdyś wykorzystywano w przemyśle kosmetycznym, przez co stanowiły spore zainteresowanie wśród wielorybników. Pozyskuje się z nich spermacet (oleistą masę znajdującą się między kośćmi ich czaszek), który wykorzystuje się do produkcji szminek i kremów oraz ambrę (masa, która powstaje jedynie w jelitach chorych lub martwych osobników), która ze względu na silny aromat o ciekawym zapachu wykorzystuje się w przemyśle perfumeryjnym – jest on niezwykle cennym surowcem, który osiąga wysokie ceny. Były głównym obiektem połowów wielorybników od XVIII do końca XIX wieku. W 1982 roku zakazano całkowicie polowania na kaszaloty spermacetowe i wpisano je do Czerwonej Księgi Gatunków Zagrożonych, gdzie przypisano je do kategorii VU (czyli „narażony na wyginięcie”).

Introwertyk z umiejętnościami miękkimi
Wykazują bardzo rozbudowany system komunikacyjny między osobnikami, mimo, że są raczej samotnikami i przez większość czasu przebywają w pojedynkę (czyli taki introwertyk z bardzo rozbudowanymi umiejętnościami miękkimi – nie przepadają za towarzystwem innych osobników i często nie wykazują potrzeby przebywania w grupie, ale jak już trzeba radzą sobie naprawdę dobrze). Mają bardzo rozbudowaną sieć zachowań społecznych, które są niemalże aż tak zaawansowane, jak w przypadku delfinów butlonosych, co stanowi często przedmiot badań zoologicznych i oceanologicznych. Na przykład, kiedy w okolicy pojawia się zagrożenie, komunikują się ze sobą ustalając miejsce spotkania, zbierają w grupę i ustawiają formację, które pozwala im chronić cielę lub rannego osobnika. Są bardzo empatyczne, pomagają sobie wzajemnie i tak jakby wyświadczają coś w rodzaju przysługi – kiedy jeden pomoże ochronić młode lub krewnego drugiego kaszalota, ten odwdzięcza się w podobny sposób, kiedy jest potrzeba. Rozpoznają się po wydawanych przez siebie dźwiękach… zwanych kliknięciami.
Wykazują bardzo rozbudowany system komunikacyjny między osobnikami, mimo, że są raczej samotnikami i przez większość czasu przebywają w pojedynkę (czyli taki introwertyk z bardzo rozbudowanymi umiejętnościami miękkimi – nie przepadają za towarzystwem innych osobników i często nie wykazują potrzeby przebywania w grupie, ale jak już trzeba radzą sobie naprawdę dobrze). Mają bardzo rozbudowaną sieć zachowań społecznych, które są niemalże aż tak zaawansowane, jak w przypadku delfinów butlonosych, co stanowi często przedmiot badań zoologicznych i oceanologicznych. Na przykład, kiedy w okolicy pojawia się zagrożenie, komunikują się ze sobą ustalając miejsce spotkania, zbierają w grupę i ustawiają formację, które pozwala im chronić cielę lub rannego osobnika. Są bardzo empatyczne, pomagają sobie wzajemnie i tak jakby wyświadczają coś w rodzaju przysługi – kiedy jeden pomoże ochronić młode lub krewnego drugiego kaszalota, ten odwdzięcza się w podobny sposób, kiedy jest potrzeba. Rozpoznają się po wydawanych przez siebie dźwiękach… zwanych kliknięciami.

Klik! Klik!
Kaszaloty spermacetowe mają bardzo rozbudowany język. Wydają dźwięki, które brzmią jak kliknięcia. Są one najgłośniejszym dźwiękiem wydawanym przez zwierzę… tak głośnym, że są w stanie uśmiercić człowieka znajdującego się w ich pobliżu (no i maja nauczkę za podsłuchiwanie rozmów kaszalotów). Ich wokalizacje osiągają głośność nawet ok. 236 decybeli. Dla porównania – dźwięk silnika odrzutowego oddalonego o 50 m od uszu człowieka dochodzi do głośności 140 dB. Przy ok. 150 decybelach dochodzi do pęknięcia bębenków usznych, zaś prób śmierci w wyniku zbyt dużego hałasu szacuje się u człowieka na od 180 dB do 200 dB. Warto też zaznaczyć, że dźwięki w wodzie rozchodzą się zupełnie inaczej, niż w powietrzu. Ponieważ woda jest gęstsza niż powietrze, dźwięk w wodzie jest mierzony w innej skali decybeli (co oznacza, że kliknięcia o mocy ponad 200 decybeli są znacznie bardziej wzmacniane, niż na lądzie). W powietrzu kaszalot nadal byłby bardzo głośny, ale znacznie mniej — 174 decybele, co i tak jest wystarczająco głośnym dźwiękiem, aby rozerwać ludziom bębenki uszne.
Kaszaloty spermacetowe mają bardzo rozbudowany język. Wydają dźwięki, które brzmią jak kliknięcia. Są one najgłośniejszym dźwiękiem wydawanym przez zwierzę… tak głośnym, że są w stanie uśmiercić człowieka znajdującego się w ich pobliżu (no i maja nauczkę za podsłuchiwanie rozmów kaszalotów). Ich wokalizacje osiągają głośność nawet ok. 236 decybeli. Dla porównania – dźwięk silnika odrzutowego oddalonego o 50 m od uszu człowieka dochodzi do głośności 140 dB. Przy ok. 150 decybelach dochodzi do pęknięcia bębenków usznych, zaś prób śmierci w wyniku zbyt dużego hałasu szacuje się u człowieka na od 180 dB do 200 dB. Warto też zaznaczyć, że dźwięki w wodzie rozchodzą się zupełnie inaczej, niż w powietrzu. Ponieważ woda jest gęstsza niż powietrze, dźwięk w wodzie jest mierzony w innej skali decybeli (co oznacza, że kliknięcia o mocy ponad 200 decybeli są znacznie bardziej wzmacniane, niż na lądzie). W powietrzu kaszalot nadal byłby bardzo głośny, ale znacznie mniej — 174 decybele, co i tak jest wystarczająco głośnym dźwiękiem, aby rozerwać ludziom bębenki uszne.
Te dźwięki są na tyle głośne pod wodą, że nurkowie, którzy znajdowali się za blisko „klikających” kaszalotów nawet nie mieli pękniętych bębenków usznych, a wręcz zostały one całkowicie wydmuchane ze względu na… towarzyszące kliknięciom wibracje. Które z kolei są tak silne, że dosłownie są w stanie sparaliżować człowieka na śmierć i zatrzymać pracę jego serca w wyniku silnych wibracji, które również mogą spowodować wstrząs mózgu. Jeden z nurków badający zachowanie kaszalotów z dość sporej odległości po tym, kiedy jeden z osobników zaczął komunikować się przy pomocy kliknięć, już po krótkiej ekspozycji na wibracje miał całkowicie sparaliżowaną rękę na prawie 4 godziny. Osłonił nią głowę i nie mógł nią później ruszyć. Kaszaloty spermacetowe rzadko używają tych dźwięków do samoobrony – częściej do polowania poprzez unieruchamianie mniejszych ofiar, do komunikowania się, badania otoczenia i poruszania się po wielkim błękicie przy pomocy echolokacji.
Jak potwale generują dźwięk o takiej głośności?
Kaszaloty spermacetowe przepuszczają powietrze przez kanały nosowe, które jest następnie przeciskane przez dwie wargi zwane „wargami małpy” z przodu nosa, tuż pod otworem – dla porównania, wytwarzanie tego dźwięku jest podobne do powietrza przechodzącego przez szyjkę balonu, działa to na podobnej zasadzie. Dźwięk ten jest następnie wzmacniany przez tłusty, wypełniony woskiem narząd zwany spermacetem (wspomniany we wcześniejszej części dzidki – składnik wykorzystywany do produkcji szminek i kremów w przemyśle kosmetycznym), który znajduje się na czubku czaszki zębowca. Następnie kliknięcia odbijają się od części czaszki i są kierowane z powrotem na zewnątrz przez narząd spermacetu. Szacuje się, że dzięki tej technice kaszaloty mogą słyszeć się nawzajem z odległości setek, a może nawet tysięcy kilometrów. Ich rozbudowana komunikacja nadal stanowi przedmiot badań oceanologów, zaś setki różnych kliknięć nadal pozostają niezrozumiałym dla człowieka szyfrem ze względu na poziom jego skomplikowania.
Kaszaloty spermacetowe przepuszczają powietrze przez kanały nosowe, które jest następnie przeciskane przez dwie wargi zwane „wargami małpy” z przodu nosa, tuż pod otworem – dla porównania, wytwarzanie tego dźwięku jest podobne do powietrza przechodzącego przez szyjkę balonu, działa to na podobnej zasadzie. Dźwięk ten jest następnie wzmacniany przez tłusty, wypełniony woskiem narząd zwany spermacetem (wspomniany we wcześniejszej części dzidki – składnik wykorzystywany do produkcji szminek i kremów w przemyśle kosmetycznym), który znajduje się na czubku czaszki zębowca. Następnie kliknięcia odbijają się od części czaszki i są kierowane z powrotem na zewnątrz przez narząd spermacetu. Szacuje się, że dzięki tej technice kaszaloty mogą słyszeć się nawzajem z odległości setek, a może nawet tysięcy kilometrów. Ich rozbudowana komunikacja nadal stanowi przedmiot badań oceanologów, zaś setki różnych kliknięć nadal pozostają niezrozumiałym dla człowieka szyfrem ze względu na poziom jego skomplikowania.



Dodatkowa literatura dla zainteresowanych:
1.https://www.projektpulsar.pl/srodowisko/2101487,1,kultura-waleni.read
2.https://wildexplained.com/are-sperm-whales-dangerous/
3.https://www.smithsonianmag.com/science-nature/the-sperm-whales-deadly-call-94653/
4.https://roaring.earth/sperm-whales-can-vibrate-humans-to-death/
5.https://whalewatchingazores.com/blog/why-do-sperm-whales-use-so-many-types/
6.https://forscubadivers.com/marine-life-for-divers/diving-with-sperm-whales-can-be-painful-or-deadly/
7.https://www.sciencedirect.com/science/article/pii/S2589004222006642
8.https://www.pbs.org/odyssey/odyssey/20010809_log_transcript.html
9.https://whalewatch.co.nz/our-nature/latest-news/how-do-sperm-whales-communicate/
10.https://ocr.org/sounds/sperm-whale/
11.https://www.gsweventcenter.com/GSW_RTC_References/1992_0801_FICON.pdf
12.https://dosits.org/galleries/audio-gallery/marine-mammals/toothed-whales/sperm-whale/
13.https://soundcloud.com/bbc_com/sperm-whale-call-5r-exchange-at-the-onset-of-a-dive
14.https://www.researchgate.net/figure/Three-dimensional-reconstruction-of-the-head-of-an-adult-sperm-whale-The-major_fig1_274674089
15.https://www.gospodarkamorska.pl/niezwykly-sen-wielorybow-wideo-56554
16.https://www.tygodnikprzeglad.pl/samotnosc-kaszalota/
17.https://www.sabbathofsenses.com/2015/10/ambra-zoto-perfumiarzy.html
18.https://www.ripleys.com/weird-news/sperm-whales/
19.https://swiatzwierzat.pl/kaszalot-smakosz-wielkich-kalamarnic-evg
20.https://wieloryby-i-ich-krewni.fandom.com/pl/wiki/Kaszalot_spermacetowy
21.https://kopalniawiedzy.pl/kaszalot-spermacetowy-kaszalot-trzesienie-ziemi-zerowanie-populacja-Marta-Guerra,31590
1.https://www.projektpulsar.pl/srodowisko/2101487,1,kultura-waleni.read
2.https://wildexplained.com/are-sperm-whales-dangerous/
3.https://www.smithsonianmag.com/science-nature/the-sperm-whales-deadly-call-94653/
4.https://roaring.earth/sperm-whales-can-vibrate-humans-to-death/
5.https://whalewatchingazores.com/blog/why-do-sperm-whales-use-so-many-types/
6.https://forscubadivers.com/marine-life-for-divers/diving-with-sperm-whales-can-be-painful-or-deadly/
7.https://www.sciencedirect.com/science/article/pii/S2589004222006642
8.https://www.pbs.org/odyssey/odyssey/20010809_log_transcript.html
9.https://whalewatch.co.nz/our-nature/latest-news/how-do-sperm-whales-communicate/
10.https://ocr.org/sounds/sperm-whale/
11.https://www.gsweventcenter.com/GSW_RTC_References/1992_0801_FICON.pdf
12.https://dosits.org/galleries/audio-gallery/marine-mammals/toothed-whales/sperm-whale/
13.https://soundcloud.com/bbc_com/sperm-whale-call-5r-exchange-at-the-onset-of-a-dive
14.https://www.researchgate.net/figure/Three-dimensional-reconstruction-of-the-head-of-an-adult-sperm-whale-The-major_fig1_274674089
15.https://www.gospodarkamorska.pl/niezwykly-sen-wielorybow-wideo-56554
16.https://www.tygodnikprzeglad.pl/samotnosc-kaszalota/
17.https://www.sabbathofsenses.com/2015/10/ambra-zoto-perfumiarzy.html
18.https://www.ripleys.com/weird-news/sperm-whales/
19.https://swiatzwierzat.pl/kaszalot-smakosz-wielkich-kalamarnic-evg
20.https://wieloryby-i-ich-krewni.fandom.com/pl/wiki/Kaszalot_spermacetowy
21.https://kopalniawiedzy.pl/kaszalot-spermacetowy-kaszalot-trzesienie-ziemi-zerowanie-populacja-Marta-Guerra,31590









 24
24