
Systemy SONAR i akustyka oceanu
 24
24
 198
198
 40
40
 26
26
24
198
40
26
Wiedza
2 l
110

Dzidki, zarówno przy niezidentyfikowanych oceanicznych dźwiękach (Bloop, Upsweep, Julia, Train, Whistle i Slowdown), jak i innych (Bioduck, Rossby Whistle), a także przy mapowaniu dna oceanicznego niejednokrotnie można było przeczytać o systemach SONAR (od ang. SOund Navigation And Ranging – „nawigacja dźwiękowa i pomiar odległości”) wykorzystywanych w mapowaniu dna morskiego. Czym one w ogóle są i jak można je wykorzystać? W jakim celu są wykorzystywane przez NOAA (National Oceanic and Atmospheric Administration)? W systemach sonarowych używa się urządzeń zwanych (jakżeby inaczej) sonarami, które służą do nawigacji, detekcji, śledzenia i klasyfikacji zanurzonych obiektów ruchomych i nieruchomych, a także do określania pozycji. Wykorzystują one fale dźwiękowe o różnej długości (krótkich, średnich i długich). Do wspomnianych czynności można wykorzystywać sonary aktywne lub pasywne. Chociaż można stosować je również w innym środowisku, niż wodne - na przykład w powietrzu lub innym środowisku gazowym (w którym wykorzystuje się bardzo szeroki zakres fal dźwiękowych obejmujących od infradźwięków do ultradźwięków), ale zajmiemy się jedynie wykorzystaniem metody sonarowej w akustyce oceanu (w tym również sposobu wykorzystania przez marynarkę wojenną).

Krótka historia sonarów
Pierwsze w historii użycie sonaru pasywnego zawdzięcza się wielkiemu wynalazcy – Leonardo DaVinci, który w 1490 roku opisał, jak przy pomocy tuby można nasłuchiwać odgłosów generowanych przez statki położone w dosyć dalekiej odległości wykorzystując do tego akustykę wody. Kolejne przełomowe wydarzenie miało miejsce w 1822 roku, kiedy to szwajcarski fizyk Daniel Colladen zbadał przy pomocy tak zwanego „podwodnego dzwonu” prędkość dźwięku w wodach jeziora Genewa, co przyczyniło się również w tym samym roku do podejmowania pierwszych prób określania map dna oceanicznego w oparciu o proste metody echa dźwiękowego. W 1877 roku ukazała się przełomowa praca naukowa o zastosowaniu fal dźwiękowych w badaniu oceanu autorstwa Brytyjczyka Lorda Rayleigha „Teoria dźwięku”, w której opisał podstawy fizyczne rozchodzenia się fal dźwiękowych. Kolejne ważne dla pomiaru fal dźwiękowych wydarzenie miało miejsce w 1880 roku, kiedy to Pierre i Jacques Curie (tak, ten pierwszy był mężem Marii Curie-Skłodowskiej, a ten drugi to jego brat - fizyk) odkryli efekt piezoelektryczny w kryształach kwarcu i tytanianu baru, co stanowiło podwaliny do generowania i odbierania fal ultradźwiękowych o częstotliwościach z zakresu milionów cykli na sekundę.
Pierwsze pomysły dotyczące zastosowania sonarów aktywnych pojawiły się w 1912 roku po zatonięciu słynnego Titanica (w celu opracowania systemu, który pomoże statkom lokalizować i omijać góry lodowe znajdujące się często pod taflą oceanu, aby podobne katastrofy nie miały więcej miejsca). Za pierwszego pomysłodawcę projektu sonaru aktywnego uważa się angielskiego meteorologa Lewisa Richardsona, który swój projekt opatentował właśnie w tym roku. Zaledwie parę miesięcy później powstał pierwszy działający, eksperymentalny system SONAR i został zbudowany przez kanadyjskiego fizyka Reginalda Fessendena dla amerykańskiej Submarine Signal Company. Z kolei w 1913 roku patent na dosyć podobne urządzenie sonaru aktywnego, jak w przypadku projektu Richardsona, uzyskał niemiecki fizyk Alexander Behm. A jeśli chodzi o pierwsze próby zastosowania sonarów aktywnych, podjęto je już w 1914 roku – odbyły się one z pokładu kutra rybackiego „Miami”, który był własnością straży przybrzeżnej USA. Do komunikacji z zanurzonym okrętem podwodnym, określenia głębokości morza oraz do nawigacji oddalonej o 3000 m góry lodowej zastosowano oscylator Fessendena, jednak okazało się, że jego rozdzielczość jest zbyt mała do dokładnego określenia kierunku góry lodowej, gdyż urządzenie pracowało na falach dźwiękowych o długości około 3 metrów, zaś długość jego anteny wynosiła zaledwie 1 metr. Jednak wyniki całego eksperymentu były do tego stopnia zadowalające, że wyposażono w owe urządzenie aż 10 brytyjskich okrętów podwodnych.
Pierwsze w historii użycie sonaru pasywnego zawdzięcza się wielkiemu wynalazcy – Leonardo DaVinci, który w 1490 roku opisał, jak przy pomocy tuby można nasłuchiwać odgłosów generowanych przez statki położone w dosyć dalekiej odległości wykorzystując do tego akustykę wody. Kolejne przełomowe wydarzenie miało miejsce w 1822 roku, kiedy to szwajcarski fizyk Daniel Colladen zbadał przy pomocy tak zwanego „podwodnego dzwonu” prędkość dźwięku w wodach jeziora Genewa, co przyczyniło się również w tym samym roku do podejmowania pierwszych prób określania map dna oceanicznego w oparciu o proste metody echa dźwiękowego. W 1877 roku ukazała się przełomowa praca naukowa o zastosowaniu fal dźwiękowych w badaniu oceanu autorstwa Brytyjczyka Lorda Rayleigha „Teoria dźwięku”, w której opisał podstawy fizyczne rozchodzenia się fal dźwiękowych. Kolejne ważne dla pomiaru fal dźwiękowych wydarzenie miało miejsce w 1880 roku, kiedy to Pierre i Jacques Curie (tak, ten pierwszy był mężem Marii Curie-Skłodowskiej, a ten drugi to jego brat - fizyk) odkryli efekt piezoelektryczny w kryształach kwarcu i tytanianu baru, co stanowiło podwaliny do generowania i odbierania fal ultradźwiękowych o częstotliwościach z zakresu milionów cykli na sekundę.
Pierwsze pomysły dotyczące zastosowania sonarów aktywnych pojawiły się w 1912 roku po zatonięciu słynnego Titanica (w celu opracowania systemu, który pomoże statkom lokalizować i omijać góry lodowe znajdujące się często pod taflą oceanu, aby podobne katastrofy nie miały więcej miejsca). Za pierwszego pomysłodawcę projektu sonaru aktywnego uważa się angielskiego meteorologa Lewisa Richardsona, który swój projekt opatentował właśnie w tym roku. Zaledwie parę miesięcy później powstał pierwszy działający, eksperymentalny system SONAR i został zbudowany przez kanadyjskiego fizyka Reginalda Fessendena dla amerykańskiej Submarine Signal Company. Z kolei w 1913 roku patent na dosyć podobne urządzenie sonaru aktywnego, jak w przypadku projektu Richardsona, uzyskał niemiecki fizyk Alexander Behm. A jeśli chodzi o pierwsze próby zastosowania sonarów aktywnych, podjęto je już w 1914 roku – odbyły się one z pokładu kutra rybackiego „Miami”, który był własnością straży przybrzeżnej USA. Do komunikacji z zanurzonym okrętem podwodnym, określenia głębokości morza oraz do nawigacji oddalonej o 3000 m góry lodowej zastosowano oscylator Fessendena, jednak okazało się, że jego rozdzielczość jest zbyt mała do dokładnego określenia kierunku góry lodowej, gdyż urządzenie pracowało na falach dźwiękowych o długości około 3 metrów, zaś długość jego anteny wynosiła zaledwie 1 metr. Jednak wyniki całego eksperymentu były do tego stopnia zadowalające, że wyposażono w owe urządzenie aż 10 brytyjskich okrętów podwodnych.

W 1915 roku francuski fizyk Paul Langevin i rosyjski inżynier Konstantin Czilowski pracujący w paryskim École Municipale de Physique et de Chimie Industrielles zaprojektowali pierwszy sonar z aktywnym elementem elektrostatycznym, zaś w 1917 roku zbudowali oni piezoelektryczny sonar kwarcowy pracujący na częstotliwości 150 kHz, który posiadał tak silną wiązkę, że zagrażała ona życiu ryb, które się na nią natknęły. Uzyskanie kwarcu o odpowiednich parametrach i zbyt wysokie napięcie pracy sprawiły, że sonar nie przyjął się. Dlatego Paul Langevin wykonał ostateczny projekt aktywnego sonaru, który na częstotliwości 40 kHz. Przetestowano je w lutym 1918 roku, jednak o ile okazało się skuteczne w wykrywaniu łodzi podwodnych i okrętów znajdujących się w dużych odległościach, jednak nadal nie potrafiło ono wyznaczyć ich dokładnego położenia i radziło sobie znacznie gorzej, niż pasywny sonar Walsera (zwany również hydrolokatorem).
Warto wspomnieć, że to właśnie w latach 1914-1918 (I Wojna Światowa) nastąpił bardzo dynamiczny rozwój urządzeń sonarowych służących do pomiaru głębokości i odległości w oceanach, a także do nawigowania obiektów znajdujących się pod wodą. Przede wszystkim testowano je z łodzi podwodnych. To właśnie na podstawie badań dotyczących dokonywania pomiarów przy pomocy fal dźwiękowych w cieczach swój początek miało zastosowanie ultrasonografii w medycynie – niedługo po tym powstał pierwszy reflektoskop służący do pomiaru fal mózgowych i NDT do badań nieniszczących. Tak więc kto wie, czy gdyby nie sonary, czy mielibyśmy dzisiaj USG.
Warto wspomnieć, że to właśnie w latach 1914-1918 (I Wojna Światowa) nastąpił bardzo dynamiczny rozwój urządzeń sonarowych służących do pomiaru głębokości i odległości w oceanach, a także do nawigowania obiektów znajdujących się pod wodą. Przede wszystkim testowano je z łodzi podwodnych. To właśnie na podstawie badań dotyczących dokonywania pomiarów przy pomocy fal dźwiękowych w cieczach swój początek miało zastosowanie ultrasonografii w medycynie – niedługo po tym powstał pierwszy reflektoskop służący do pomiaru fal mózgowych i NDT do badań nieniszczących. Tak więc kto wie, czy gdyby nie sonary, czy mielibyśmy dzisiaj USG.
W 1916 roku Anglicy rozpoczęli wykonywanie swoich eksperymentów z sonarem przez zespół naukowców nazwany Anti-Submarine Division pod kierownictwem Roberta Boyle'a. Bazując częściowo na badaniach Paula Langevina w 1917 roku zbudowano pierwszy praktyczny sonar. Wszystkie prace nad nim otoczono największą klauzulą tajności w wyniku czego nie wspominano w nich o kwarcu ani ultradźwiękach, które w dokumentacji zastępowano innymi akronimami: ultradźwięki - ASD, quartz – ASDivite. To właśnie z tego wywodzi się nazwa określająca angielski system sonarowy: ASDIC. Co ciekawe, spekulowano, że akronim wywodzi się od nazwy „Allied Submarine Detection Investigation Committee czy Anti-Submarine Detection Investigation Committee”, jednak okazało się, że komitet o takiej nazwie tak naprawdę nigdy nie istniał – mogło to wynikać z najwyższego stopnia utajnienia dokumentacji Boyle’a i jego zespołu.
Dopiero w 1930 roku amerykańscy inżynierowie skonstruowali swoją własną podwodną technologię do wykrywania i rejestrowania dźwięków, nawigacji, detekcji, śledzenia i klasyfikacji zanurzonych obiektów ruchomych i nieruchomych, a także do określania ich pozycji (co bazowało na angielskim systemie ASDIC, który został przekazany USA po wybuchu II Wojny Światowej). Nazwali ten system SONAR (termin zaproponowany przez Fredericka Hunta jako odpowiednika dla systemu RADAR). Dzięki niemu dokonano ważnych odkryć, takich jak istnienie termoklin i ich wpływ na fale dźwiękowe.
Dopiero w 1930 roku amerykańscy inżynierowie skonstruowali swoją własną podwodną technologię do wykrywania i rejestrowania dźwięków, nawigacji, detekcji, śledzenia i klasyfikacji zanurzonych obiektów ruchomych i nieruchomych, a także do określania ich pozycji (co bazowało na angielskim systemie ASDIC, który został przekazany USA po wybuchu II Wojny Światowej). Nazwali ten system SONAR (termin zaproponowany przez Fredericka Hunta jako odpowiednika dla systemu RADAR). Dzięki niemu dokonano ważnych odkryć, takich jak istnienie termoklin i ich wpływ na fale dźwiękowe.

Sonary – Charakterystyka ogólna
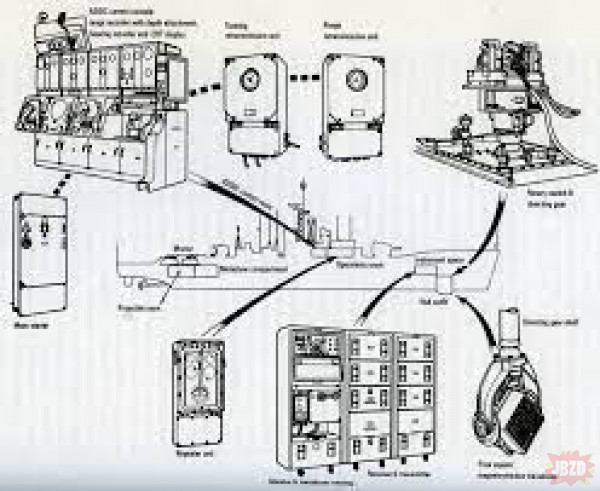
SONAR to system wykorzystujący fale dźwiękowe do eksploracji oceanu. Naukowcy używają sonarów głównie do opracowywania map morskich, lokalizowania podwodnych zagrożeń dla nawigacji, wyszukiwania i identyfikowania obiektów w słupie wody i na dnie morskim, takich jak wraki statków oraz mapowania samego dna oceanu. Sonar jest używany w oceanografii, ponieważ fale dźwiękowe przemieszczają się w wodzie na większe odległości, niż fale radarowe i świetlne. System SONAR składa się z fizycznych czujników dźwięku zwanych przetwornikami. Naukowcy mogą zdecydować się na użycie pojedynczego przetwornika lub ich grupy (zwanej układem przetworników). Tablicę można przymocować do różnych platform, w tym zdalnie sterowanego pojazdu, autonomicznego pojazdu podwodnego, statku lub platformy (np. holownik lub szybowiec). Istnieją dwa rodzaje sonarów: aktywny i pasywny.
Rodzaje systemów sonarowych
Istnieje kilka różnych typów systemów sonarowych. Przykłady pasywnych systemów sonarowych mogą obejmować pojedynczy hydrofon lub zestaw hydrofonów holowanych za statkiem lub przymocowanych do platformy. Sonar z wieloma wiązkami, skanowaniem bocznym, wiązką dzieloną, profilowaniem poddennym i sonarem z syntetyczną aperturą (otwór ograniczający przestrzeń, przez który przechodzą fale) to przykłady aktywnych systemów sonarowych. Naukowcy wybierają typ sonaru na podstawie celów wyprawy. Niektóre systemy sonarowe mogą obrazować niewielki obszar w bardzo wysokiej rozdzielczości, co jest przydatne w przypadku szczegółów (np. wraki czy ruiny zatopionych obiektów sprzed wieków będących częścią dziedzictwa kulturowego – na przykład zatopione miasta czy posągi). Badacze mogą chcieć też zastosować system sonaru o niższej rozdzielczości, ale mogący mapować znacznie większy obszar, taki jak góra podwodna, rowy oceaniczne lub inny obiekt geologiczny, co jest przydatne chociażby w sporządzaniu map dna morskiego.
SONAR to system wykorzystujący fale dźwiękowe do eksploracji oceanu. Naukowcy używają sonarów głównie do opracowywania map morskich, lokalizowania podwodnych zagrożeń dla nawigacji, wyszukiwania i identyfikowania obiektów w słupie wody i na dnie morskim, takich jak wraki statków oraz mapowania samego dna oceanu. Sonar jest używany w oceanografii, ponieważ fale dźwiękowe przemieszczają się w wodzie na większe odległości, niż fale radarowe i świetlne. System SONAR składa się z fizycznych czujników dźwięku zwanych przetwornikami. Naukowcy mogą zdecydować się na użycie pojedynczego przetwornika lub ich grupy (zwanej układem przetworników). Tablicę można przymocować do różnych platform, w tym zdalnie sterowanego pojazdu, autonomicznego pojazdu podwodnego, statku lub platformy (np. holownik lub szybowiec). Istnieją dwa rodzaje sonarów: aktywny i pasywny.
Rodzaje systemów sonarowych
Istnieje kilka różnych typów systemów sonarowych. Przykłady pasywnych systemów sonarowych mogą obejmować pojedynczy hydrofon lub zestaw hydrofonów holowanych za statkiem lub przymocowanych do platformy. Sonar z wieloma wiązkami, skanowaniem bocznym, wiązką dzieloną, profilowaniem poddennym i sonarem z syntetyczną aperturą (otwór ograniczający przestrzeń, przez który przechodzą fale) to przykłady aktywnych systemów sonarowych. Naukowcy wybierają typ sonaru na podstawie celów wyprawy. Niektóre systemy sonarowe mogą obrazować niewielki obszar w bardzo wysokiej rozdzielczości, co jest przydatne w przypadku szczegółów (np. wraki czy ruiny zatopionych obiektów sprzed wieków będących częścią dziedzictwa kulturowego – na przykład zatopione miasta czy posągi). Badacze mogą chcieć też zastosować system sonaru o niższej rozdzielczości, ale mogący mapować znacznie większy obszar, taki jak góra podwodna, rowy oceaniczne lub inny obiekt geologiczny, co jest przydatne chociażby w sporządzaniu map dna morskiego.
Sonar aktywny
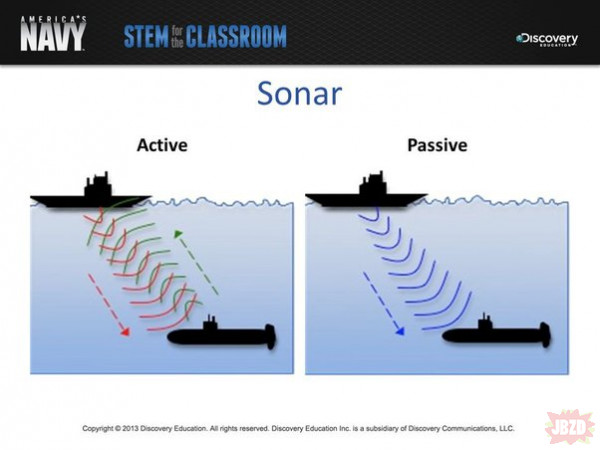
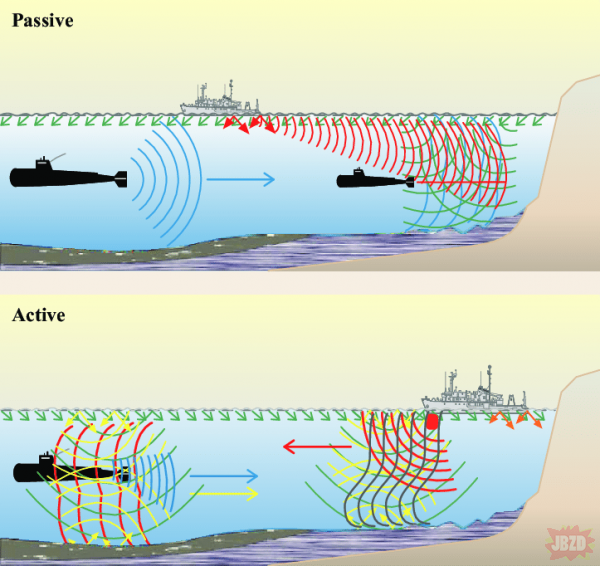
Przy aktywnym sonarze układ przetworników emituje sygnał akustyczny lub impuls dźwiękowy do wody. Jeśli obiekt znajduje się na ścieżce impulsu dźwiękowego, ten odbija się od obiektu i zwraca do układu odbite od niego echo. Jeśli macierz jest wyposażona w możliwość odbioru sygnałów, mierzy ich siłę. Określając czas między emisją impulsu dźwiękowego a jego odbiorem, przetwornik może określić zasięg i orientację obiektu.
Przy aktywnym sonarze układ przetworników emituje sygnał akustyczny lub impuls dźwiękowy do wody. Jeśli obiekt znajduje się na ścieżce impulsu dźwiękowego, ten odbija się od obiektu i zwraca do układu odbite od niego echo. Jeśli macierz jest wyposażona w możliwość odbioru sygnałów, mierzy ich siłę. Określając czas między emisją impulsu dźwiękowego a jego odbiorem, przetwornik może określić zasięg i orientację obiektu.
Sonar pasywny
Pasywne systemy sonarowe są używane głównie do wykrywania hałasu obiektów morskich (takich jak łodzie podwodne lub statki) oraz zwierząt morskich. W przeciwieństwie do sonaru aktywnego, sonar pasywny nie emituje własnego sygnału, co jest zaletą dla jednostek wojskowych, które nie chcą zostać znalezione lub dla misji naukowych, które koncentrują się na cichym nasłuchiwaniu akustyki oceanu. Zamiast tego, sonar pasywny wykrywa tylko zbliżające się do niego fale dźwiękowe. Pojedynczy pasywny instrument sonarowy nie może mierzyć zasięgu obiektu, chyba że jest używany w połączeniu z innymi pasywnymi urządzeniami odsłuchowymi. Wiele pasywnych urządzeń sonarowych może pozwolić na triangulację źródła dźwięku, biorąc pod uwagę również opóźnienie czasowe dotarcia do nich odbitej fali dźwiękowej.
W jaki sposób działają sonary?
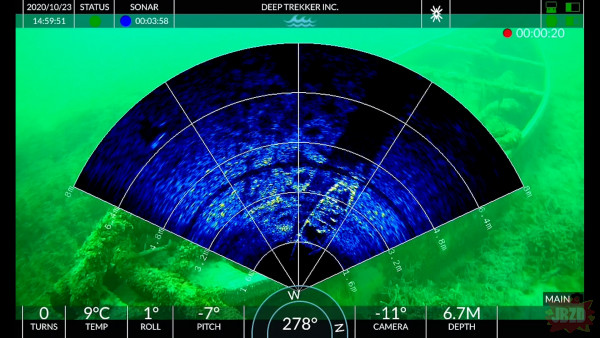
Sonary wysyłają impulsy fal dźwiękowych przenikających przez wodę, po czym uderzają w obiekty (np. dno morskie, ryby, koralowce, roślinność czy łodzie podwodne) i odbijają się z powrotem w kierunku powierzchni, gdzie zostaje zarejestrowany obraz. Urządzenie mierzy, jak długo trwa falowanie dźwięku, uderzenie o obiekt, a następnie odbicie od niego wysłanej fali. Przypomina to nieco zasadę działania echolokacji używanej przez nietoperze czy delfiny. Tak pozyskana informacja umożliwia również oszacowanie głębokości obiektu, od którego odbiła się fala i mierzy moc powracającego impulsu (im twardsze są obiekty, od których odbija się fala dźwiękowa, tym silniejszy impuls powrotny). Po każdym powracającym impulsie wysyłane są kolejne. Ponieważ fale dźwiękowe przemieszczają się z ok. 1,6 km na sekundę w wodzie, echosondy mogą wysyłać wiele impulsów na sekundę. Powracające impulsy dźwiękowe są przekształcane na sygnały elektryczne, a następnie wyświetlane na ekranach pokazując głębokość i twardość dna oraz wszelkie obiekty znajdujące się pod powierzchnią wody. Należy również pamiętać, że sonary skanują przestrzeń w stożkach, a nie liniach.
Pasywne systemy sonarowe są używane głównie do wykrywania hałasu obiektów morskich (takich jak łodzie podwodne lub statki) oraz zwierząt morskich. W przeciwieństwie do sonaru aktywnego, sonar pasywny nie emituje własnego sygnału, co jest zaletą dla jednostek wojskowych, które nie chcą zostać znalezione lub dla misji naukowych, które koncentrują się na cichym nasłuchiwaniu akustyki oceanu. Zamiast tego, sonar pasywny wykrywa tylko zbliżające się do niego fale dźwiękowe. Pojedynczy pasywny instrument sonarowy nie może mierzyć zasięgu obiektu, chyba że jest używany w połączeniu z innymi pasywnymi urządzeniami odsłuchowymi. Wiele pasywnych urządzeń sonarowych może pozwolić na triangulację źródła dźwięku, biorąc pod uwagę również opóźnienie czasowe dotarcia do nich odbitej fali dźwiękowej.
W jaki sposób działają sonary?
Sonary wysyłają impulsy fal dźwiękowych przenikających przez wodę, po czym uderzają w obiekty (np. dno morskie, ryby, koralowce, roślinność czy łodzie podwodne) i odbijają się z powrotem w kierunku powierzchni, gdzie zostaje zarejestrowany obraz. Urządzenie mierzy, jak długo trwa falowanie dźwięku, uderzenie o obiekt, a następnie odbicie od niego wysłanej fali. Przypomina to nieco zasadę działania echolokacji używanej przez nietoperze czy delfiny. Tak pozyskana informacja umożliwia również oszacowanie głębokości obiektu, od którego odbiła się fala i mierzy moc powracającego impulsu (im twardsze są obiekty, od których odbija się fala dźwiękowa, tym silniejszy impuls powrotny). Po każdym powracającym impulsie wysyłane są kolejne. Ponieważ fale dźwiękowe przemieszczają się z ok. 1,6 km na sekundę w wodzie, echosondy mogą wysyłać wiele impulsów na sekundę. Powracające impulsy dźwiękowe są przekształcane na sygnały elektryczne, a następnie wyświetlane na ekranach pokazując głębokość i twardość dna oraz wszelkie obiekty znajdujące się pod powierzchnią wody. Należy również pamiętać, że sonary skanują przestrzeń w stożkach, a nie liniach.
Warto wspomnieć, że sonary są niezwykle pożyteczne podczas wykrywania wszelkich przeszkód znajdujących się w wodzie – zwłaszcza przez wszelkiego rodzaju łodzie podwodne, okręty, statki czy nawet łodzie albo podwodne drony. Pomagają w określeniu dokładniejszych rozmiarów danej przeszkody oraz jej położenia geograficznego (dotyczy to sonarów stanowiących część systemu hydrograficznego), w tym wysokości, którą wylicza się na podstawie analizy długości cienia akustycznego.
Przy odczytywaniu zapisów z sonarów warto wziąć pod uwagę również zakłócenia powierzchni, które występują we wszystkich urządzeniach tego typu. Przy powierzchni mogą pojawiać się zakłócenia, ponieważ woda blisko powierzchni odbija niektóre fale dźwiękowe wysyłane przez sonary, a odbicia te mogą mieć za dużą prędkość, żeby można je było prawidłowo przetworzyć, dlatego do odczytywania bardziej szczegółowych zapisów pomiaru sonarem (zwłaszcza w marynarce wojennej czy stacjach badawczych) wymagane jest odpowiednie doświadczenie w interpretacji pozyskanych danych. Takie odbicie może mieć wiele przyczyn – od fal na powierzchni wody, przez bąbelki powietrza, przepływające stworzenia, podwodną roślinność czy wiele innych, co może powodować zakłócenia w przypowierzchniowej strefie sonaru (tworzy to swego rodzaju „ślepą strefę”, która uniemożliwia prawidłową identyfikację stworzeń morskich).
Przy odczytywaniu zapisów z sonarów warto wziąć pod uwagę również zakłócenia powierzchni, które występują we wszystkich urządzeniach tego typu. Przy powierzchni mogą pojawiać się zakłócenia, ponieważ woda blisko powierzchni odbija niektóre fale dźwiękowe wysyłane przez sonary, a odbicia te mogą mieć za dużą prędkość, żeby można je było prawidłowo przetworzyć, dlatego do odczytywania bardziej szczegółowych zapisów pomiaru sonarem (zwłaszcza w marynarce wojennej czy stacjach badawczych) wymagane jest odpowiednie doświadczenie w interpretacji pozyskanych danych. Takie odbicie może mieć wiele przyczyn – od fal na powierzchni wody, przez bąbelki powietrza, przepływające stworzenia, podwodną roślinność czy wiele innych, co może powodować zakłócenia w przypowierzchniowej strefie sonaru (tworzy to swego rodzaju „ślepą strefę”, która uniemożliwia prawidłową identyfikację stworzeń morskich).
Sonary w mapowaniu dna oceanicznego
Głębiny oceanów nadal pozostają najmniej zbadanymi obszarami naszego globu. Do tej pory wiele tajemnic dotyczących oceanów pozostało niewyjaśnionych. Przez wiele lat temat mapowania był traktowany mocno po macoszemu, ale niedawno zapowiedziano, że do 2030 roku ma powstać pełna mapa dna oceanicznego. Co ciekawe, badanie dna morskiego często przeprowadza się przy pomocy sonarów, czyli urządzeń, którymi wykryto tajemnicze dźwięki, jak Bloop, Upsweep, Julia, Slowdown, Whistle i Train. Mapowanie dna morskiego (inaczej obrazowanie dna morskiego) polega na pomiarze głębokości w danym akwenie – wykonywane w nich pomiary batymetryczne prowadzone są różnymi metodami (od technik sonarowych i lidarowych, po boje i wysokościomierze satelitarne).
Do wykonywania map dna morskiego używa się głównie echosond (tzw. metoda sondowania echa), jednak w ostatnich latach nowe technologie rozwinęły się na tyle, że powstały nawet drony i bezzałogowe łodzie podwodne do skanowania dna oceanów. Oczywiście całe mapowanie odbywa się także z udziałem satelitów, które wspomagają monitorowanie dna oceanicznego oraz badają lodowce. Używa się także stałych podwodnych laboratoriów badawczych, hydrofonów oraz dokonuje pomiarów w głębinach przy pomocy batyskafów. Sejsmografy mają wykrywać podziemne próby jądrowe, anteny infradźwiękowe - eksplozje w atmosferze, stacje hydroakustyczne - podwodne testy, zaś zadaniem detektorów gamma jest namierzanie nawet niewielkiego stężenia w powietrzu cząstek radioaktywnych (tutaj warto wspomnieć, że śledziły one między innymi wędrówkę substancji uwolnionych podczas awarii elektrowni Fukushima Daiichi, zaś wcześniej wszczęły alarm po próbach atomowych przeprowadzonych przez Koreę Północną w 2006 oraz 2009 roku). Detektory gamma wykrywają również takie promieniowanie w oceanach.
Głębiny oceanów nadal pozostają najmniej zbadanymi obszarami naszego globu. Do tej pory wiele tajemnic dotyczących oceanów pozostało niewyjaśnionych. Przez wiele lat temat mapowania był traktowany mocno po macoszemu, ale niedawno zapowiedziano, że do 2030 roku ma powstać pełna mapa dna oceanicznego. Co ciekawe, badanie dna morskiego często przeprowadza się przy pomocy sonarów, czyli urządzeń, którymi wykryto tajemnicze dźwięki, jak Bloop, Upsweep, Julia, Slowdown, Whistle i Train. Mapowanie dna morskiego (inaczej obrazowanie dna morskiego) polega na pomiarze głębokości w danym akwenie – wykonywane w nich pomiary batymetryczne prowadzone są różnymi metodami (od technik sonarowych i lidarowych, po boje i wysokościomierze satelitarne).
Do wykonywania map dna morskiego używa się głównie echosond (tzw. metoda sondowania echa), jednak w ostatnich latach nowe technologie rozwinęły się na tyle, że powstały nawet drony i bezzałogowe łodzie podwodne do skanowania dna oceanów. Oczywiście całe mapowanie odbywa się także z udziałem satelitów, które wspomagają monitorowanie dna oceanicznego oraz badają lodowce. Używa się także stałych podwodnych laboratoriów badawczych, hydrofonów oraz dokonuje pomiarów w głębinach przy pomocy batyskafów. Sejsmografy mają wykrywać podziemne próby jądrowe, anteny infradźwiękowe - eksplozje w atmosferze, stacje hydroakustyczne - podwodne testy, zaś zadaniem detektorów gamma jest namierzanie nawet niewielkiego stężenia w powietrzu cząstek radioaktywnych (tutaj warto wspomnieć, że śledziły one między innymi wędrówkę substancji uwolnionych podczas awarii elektrowni Fukushima Daiichi, zaś wcześniej wszczęły alarm po próbach atomowych przeprowadzonych przez Koreę Północną w 2006 oraz 2009 roku). Detektory gamma wykrywają również takie promieniowanie w oceanach.
Trudność w mapowaniu dna morskiego polega na tym, że niemożliwe jest zbadanie większości przy pomocy kamer czy zdjęć satelitarnych. Do tej pory pomiaru dokonywano przy pomocy sonarów i zajmowały się tym głównie naukowcy z NOAA (National Oceanic and Atmospheric Administration – amerykańska agencja zajmująca się między innymi prognozowaniem pogody oraz ostrzeżeniami sztormowymi, a także innych zjawisk zachodzących w oceanach i atmosferze), ESA (European Space Agency – Europejska Agencja Kosmiczna, która przeprowadza monitorowanie dna oceanicznego w oparciu o dane z satelity NASA Jason-1 i z satelity ESA CryoSat-2, którego głównym zadaniem jest badanie lodowców w regionach polarnych) oraz naukowcy z California's Scripps Institution of Oceanography (SIO). Od 2014 roku do programów badania dna oceanicznego przyłączyła się NASA, która wzięła aktywny udział poprzez program NASA Extreme Environment Mission Operations (NEEMO – nazwany tak od najdalej oddalonego od lądu Punktu Nemo).
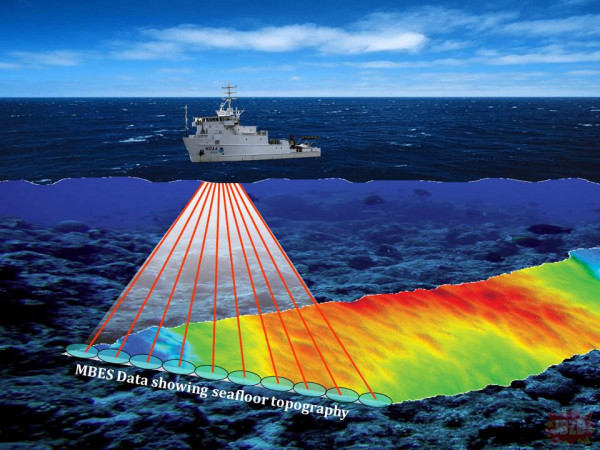
Echosondy zostały po raz pierwszy użyte do badań oceanograficznych podczas epickiej niemieckiej ekspedycji badającej południowy Atlantyk w połowie lat dwudziestych XX wieku na pokładzie Meteora. Aktualnie echosondowanie pozostaje kluczową metodą stosowaną przez naukowców do tworzenia batymetrycznych map dna morskiego. Przez ostatnie 30 lat naukowcy zajmujący się morzem używali sonaru wielowiązkowego, który może automatycznie tworzyć bardzo szczegółowe mapy konturowe dużych obszarów dna morskiego, gdy statek badawczy porusza się szybko (około 12 węzłów) po powierzchni oceanu. Obecnie istnieje wiele różnych typów sonarów, które pomagają uzyskać dane nie tylko o głębokości, ale także o strukturze dna oceanicznego, a nawet o prądach morskich i życiu w oceanie.
Echosondy zostały po raz pierwszy użyte do badań oceanograficznych podczas epickiej niemieckiej ekspedycji badającej południowy Atlantyk w połowie lat dwudziestych XX wieku na pokładzie Meteora. Aktualnie echosondowanie pozostaje kluczową metodą stosowaną przez naukowców do tworzenia batymetrycznych map dna morskiego. Przez ostatnie 30 lat naukowcy zajmujący się morzem używali sonaru wielowiązkowego, który może automatycznie tworzyć bardzo szczegółowe mapy konturowe dużych obszarów dna morskiego, gdy statek badawczy porusza się szybko (około 12 węzłów) po powierzchni oceanu. Obecnie istnieje wiele różnych typów sonarów, które pomagają uzyskać dane nie tylko o głębokości, ale także o strukturze dna oceanicznego, a nawet o prądach morskich i życiu w oceanie.
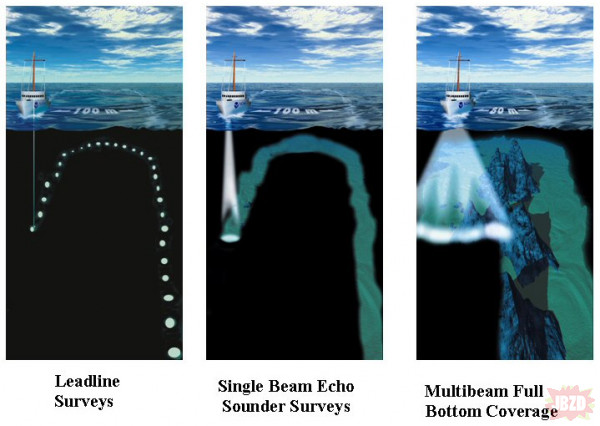
Echosondy jednowiązkowe i wielowiązkowe
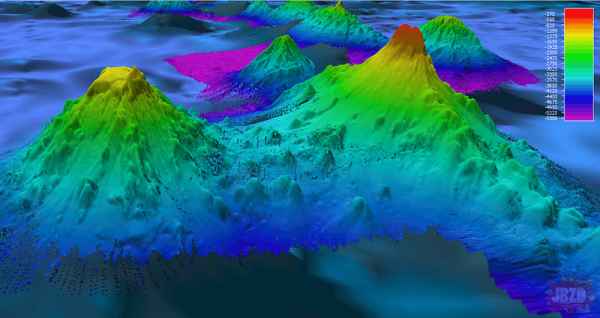
Ze statku wysyła się impuls dźwiękowy, na podstawie którego głębokość określa się poprzez podzielenie prędkości dźwięku (około 1500 metrów na sekundę) przez połowę czasu potrzebnego do zarejestrowania echa dna oceanicznego (połowę czasu, ponieważ całkowity obejmował odbicie echa od statku do dna morskiego i z powrotem). Były to wczesne systemy pomiaru głębokości w jednym punkcie, zwykle poniżej stępki statku – nazywano je echosondami jednowiązkowymi. W 1957 roku Marie Tharp i Bruce Charles Heezen stworzyli pierwszą trójwymiarową mapę fizjograficzną basenów oceanicznych. Wykorzystano do tego komputery, które dzięki możliwości dokonywania szybkich obliczeń dużych ilości danych ułatwiły stworzenie tej mapy. Spowodowało to tworzenie wizualizacji dna morskiego metodą cyfrową, gdzie zaczęto je odwzorowywać z dosyć dużą szczegółowością. To właśnie dzięki nim we współpracy z nowopowstałą organizacją NOAA stworzono pierwszą cyfrową mapę dna oceanicznego w 1970 roku na podstawie rejestrowania dźwięków hydroakustycznych (od metod sonarowych i lidarowych po wysokościomierze). Coraz bardziej powszechne było mapowanie batymetryczne wielu wiązek, które od pojedynczych różniły się tym, że dźwięk jest przenoszony poniżej i na boki statku, dzięki czemu było możliwe uzyskanie pełnego obrazu dna oceanicznego, a nie jedynie pojedynczych punktów, jak w przypadku echosond jednowiązkowych. Dodatkowo, uzyskane pomiary były automatycznie rejestrowane na komputerze i przetwarzane w taki sposób, że mogły być zapisane w formie mapy.
Ze statku wysyła się impuls dźwiękowy, na podstawie którego głębokość określa się poprzez podzielenie prędkości dźwięku (około 1500 metrów na sekundę) przez połowę czasu potrzebnego do zarejestrowania echa dna oceanicznego (połowę czasu, ponieważ całkowity obejmował odbicie echa od statku do dna morskiego i z powrotem). Były to wczesne systemy pomiaru głębokości w jednym punkcie, zwykle poniżej stępki statku – nazywano je echosondami jednowiązkowymi. W 1957 roku Marie Tharp i Bruce Charles Heezen stworzyli pierwszą trójwymiarową mapę fizjograficzną basenów oceanicznych. Wykorzystano do tego komputery, które dzięki możliwości dokonywania szybkich obliczeń dużych ilości danych ułatwiły stworzenie tej mapy. Spowodowało to tworzenie wizualizacji dna morskiego metodą cyfrową, gdzie zaczęto je odwzorowywać z dosyć dużą szczegółowością. To właśnie dzięki nim we współpracy z nowopowstałą organizacją NOAA stworzono pierwszą cyfrową mapę dna oceanicznego w 1970 roku na podstawie rejestrowania dźwięków hydroakustycznych (od metod sonarowych i lidarowych po wysokościomierze). Coraz bardziej powszechne było mapowanie batymetryczne wielu wiązek, które od pojedynczych różniły się tym, że dźwięk jest przenoszony poniżej i na boki statku, dzięki czemu było możliwe uzyskanie pełnego obrazu dna oceanicznego, a nie jedynie pojedynczych punktów, jak w przypadku echosond jednowiązkowych. Dodatkowo, uzyskane pomiary były automatycznie rejestrowane na komputerze i przetwarzane w taki sposób, że mogły być zapisane w formie mapy.
System SONAR w rejestracji dźwięków z oceanu
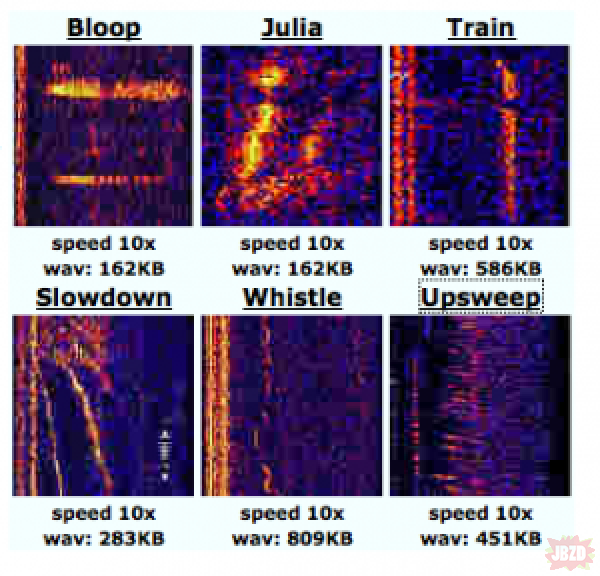
Przy pomocy systemu SONAR wykorzystywanego przez NOAA począwszy od 1991 roku dokonano rejestracji 6 niezidentyfikowanych dotąd dźwięków o bardzo niskiej częstotliwości: Upsweep, Bloop, Julia, Train, Whistle i SlowDown. Niniejszej rejestracji dokonano przy pomocy zdemobilizowanego systemu wojskowego SOSUS (Sound Surveillance System), który jest specjalnym systemem obserwacji akustycznej - dokonuje jej przy pomocy sensorów pasywnych. Urządzenie to potrafi rejestrować dźwięki z wielkich przestrzeni oceanicznych. Początkowo wykorzystywany był do namierzania radzieckich okrętów podwodnych, jednak z czasem zmieniono je w narzędzie pomiarowe do badania dna oceanu wykorzystując zasięg sonarowy. Również w późniejszych latach niezidentyfikowane dźwięki zostały zarejestrowane w ramach Projektu Monitoringu Akustycznego Programu VENTS (The Acoustic Monitoring Project of the VENTS Program), który zaczęto prowadzić od sierpnia 1991 roku przy użyciu sieci Systemu Kontroli Dźwiękowej Amerykańskiej Marynarki Wojennej oraz podwodnych hydroskopów.
Warto podkreślić, że zasięg sonarowego rozpoznania oceanicznego obejmuje mniej niż 1% obszaru dna oceanów, zaś pełne pokrycie ich hydrofonami, do którego niestety jest jeszcze bardzo daleko, pozwoliłoby wyjaśnić liczne zagadki (nie tylko zaginione wraki czy samoloty, ale również niezidentyfikowane dźwięki, których źródło można byłoby wtedy znacznie łatwiej ustalić). Ponadto udałoby się w znacznie większym stopniu eksplorować dno oceaniczne, zgłębić życie wielu gatunków morskich czy zaobserwować inne zjawiska, jak erupcje podwodnych wulkanów czy tarcie płyt tektonicznych.
Niestety system ten ma również poważną wadę, jaką jest wzrost poziomu hałasu w oceanach. Przyczynia się to do dezorientacji zwierząt morskich posługującymi się falami akustycznymi do nawigacji czy komunikacją z innymi osobnikami, co zakłóca ich naturalny cykl życia (nie wspominając już o tym, że technologia sonarowa może spowodować uszkodzenie słuchu). To wszystko sprawia, że chociaż aktualnie jest to najskuteczniejsza metoda pomiarowa, należałoby szukać alternatywnych rozwiązań, które będą równie skuteczne czy nawet lepsze.
Przy pomocy systemu SONAR wykorzystywanego przez NOAA począwszy od 1991 roku dokonano rejestracji 6 niezidentyfikowanych dotąd dźwięków o bardzo niskiej częstotliwości: Upsweep, Bloop, Julia, Train, Whistle i SlowDown. Niniejszej rejestracji dokonano przy pomocy zdemobilizowanego systemu wojskowego SOSUS (Sound Surveillance System), który jest specjalnym systemem obserwacji akustycznej - dokonuje jej przy pomocy sensorów pasywnych. Urządzenie to potrafi rejestrować dźwięki z wielkich przestrzeni oceanicznych. Początkowo wykorzystywany był do namierzania radzieckich okrętów podwodnych, jednak z czasem zmieniono je w narzędzie pomiarowe do badania dna oceanu wykorzystując zasięg sonarowy. Również w późniejszych latach niezidentyfikowane dźwięki zostały zarejestrowane w ramach Projektu Monitoringu Akustycznego Programu VENTS (The Acoustic Monitoring Project of the VENTS Program), który zaczęto prowadzić od sierpnia 1991 roku przy użyciu sieci Systemu Kontroli Dźwiękowej Amerykańskiej Marynarki Wojennej oraz podwodnych hydroskopów.
Warto podkreślić, że zasięg sonarowego rozpoznania oceanicznego obejmuje mniej niż 1% obszaru dna oceanów, zaś pełne pokrycie ich hydrofonami, do którego niestety jest jeszcze bardzo daleko, pozwoliłoby wyjaśnić liczne zagadki (nie tylko zaginione wraki czy samoloty, ale również niezidentyfikowane dźwięki, których źródło można byłoby wtedy znacznie łatwiej ustalić). Ponadto udałoby się w znacznie większym stopniu eksplorować dno oceaniczne, zgłębić życie wielu gatunków morskich czy zaobserwować inne zjawiska, jak erupcje podwodnych wulkanów czy tarcie płyt tektonicznych.
Niestety system ten ma również poważną wadę, jaką jest wzrost poziomu hałasu w oceanach. Przyczynia się to do dezorientacji zwierząt morskich posługującymi się falami akustycznymi do nawigacji czy komunikacją z innymi osobnikami, co zakłóca ich naturalny cykl życia (nie wspominając już o tym, że technologia sonarowa może spowodować uszkodzenie słuchu). To wszystko sprawia, że chociaż aktualnie jest to najskuteczniejsza metoda pomiarowa, należałoby szukać alternatywnych rozwiązań, które będą równie skuteczne czy nawet lepsze.
Wykorzystanie sonarów przez marynarkę wojenną
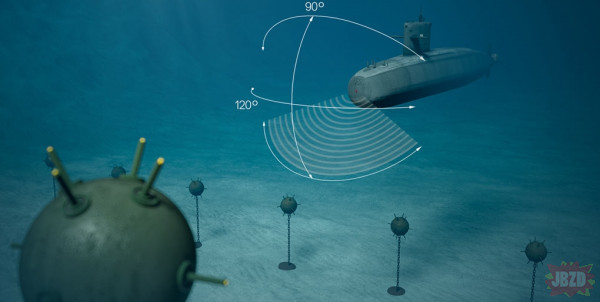
Oceany zawsze odgrywały dużą rolę w wojnach. Statki transportowały armie i zaopatrzenie, blokowały porty, oblegały miasta i atakowały wrogie statki, robiąc to samo. Ale wojna secesyjna pomogła wystrzelić nową, ukrytą broń morską, która stała się powszechna w okrętach podwodnych XX wieku. Aby zwalczyć to nowe zagrożenie, przywódcy marynarki wojennej zdali sobie sprawę, że mogą wykrywać okręty podwodne przy pomocy dźwięku przenoszonego przez wodę. Wojsko opracowało również inne narzędzia, które również okazały się przydatne dla oceanografów, takie jak magnetometr, który mierzy pola magnetyczne. Marynarka wojenna używa go do wykrywania dużych metalowych kadłubów okrętów podwodnych (z kolei oceanografowie używają go do poznawania właściwości magnetycznych skał dna morskiego). Ponadto oprócz namierzania wrogich okrętów, statków i łodzi podwodnych, sonary umożliwiają także wykrywanie zatopionych obiektów, takich jak torpedy czy miny morskie wraz z dokładnym określeniem ich lokalizacji, wielkości i głębokości, na jakiej się znajdują, co pomaga w podjęciu odpowiednich działań.
Chociaż często mówi się o wojnach prowadzonych na lądzie, bardzo często podejmowane są różne manewry militarne, testy czy atak na wrogie okręty na terenie mórz i oceanów. System SONAR pomaga w śledzeniu wrogich okrętów, obserwacji podejmowanych przez nie działań czy nawet w dokładnym określaniu odległości, co pomaga na przykład w celnym wystrzeleniu torpedy lub pocisku. Najczęściej podwodne okręty pozostają ukryte w głębinach i starają się podpłynąć do wroga tak blisko, jak tylko się da bez wykrycia aktywnym sonarem, jednak zdarzają się błędy – dlatego tak istotne jest zastosowanie systemu sonarowego również w samoobronie: często ten, kto trafi celniej pociskiem i szybciej zyskuje przewagę (ale najczęściej preferuje się wykonanie ataku z ukrycia wykorzystując nieprzejrzystość oceanów, aby atak nie został wykryty z powietrza przez samoloty czy drony wroga). Brak wynurzenia okrętu i pozostanie w ukryciu w oceanicznych głębinach chroni je również przed wykryciem radarami.
Oceany zawsze odgrywały dużą rolę w wojnach. Statki transportowały armie i zaopatrzenie, blokowały porty, oblegały miasta i atakowały wrogie statki, robiąc to samo. Ale wojna secesyjna pomogła wystrzelić nową, ukrytą broń morską, która stała się powszechna w okrętach podwodnych XX wieku. Aby zwalczyć to nowe zagrożenie, przywódcy marynarki wojennej zdali sobie sprawę, że mogą wykrywać okręty podwodne przy pomocy dźwięku przenoszonego przez wodę. Wojsko opracowało również inne narzędzia, które również okazały się przydatne dla oceanografów, takie jak magnetometr, który mierzy pola magnetyczne. Marynarka wojenna używa go do wykrywania dużych metalowych kadłubów okrętów podwodnych (z kolei oceanografowie używają go do poznawania właściwości magnetycznych skał dna morskiego). Ponadto oprócz namierzania wrogich okrętów, statków i łodzi podwodnych, sonary umożliwiają także wykrywanie zatopionych obiektów, takich jak torpedy czy miny morskie wraz z dokładnym określeniem ich lokalizacji, wielkości i głębokości, na jakiej się znajdują, co pomaga w podjęciu odpowiednich działań.
Chociaż często mówi się o wojnach prowadzonych na lądzie, bardzo często podejmowane są różne manewry militarne, testy czy atak na wrogie okręty na terenie mórz i oceanów. System SONAR pomaga w śledzeniu wrogich okrętów, obserwacji podejmowanych przez nie działań czy nawet w dokładnym określaniu odległości, co pomaga na przykład w celnym wystrzeleniu torpedy lub pocisku. Najczęściej podwodne okręty pozostają ukryte w głębinach i starają się podpłynąć do wroga tak blisko, jak tylko się da bez wykrycia aktywnym sonarem, jednak zdarzają się błędy – dlatego tak istotne jest zastosowanie systemu sonarowego również w samoobronie: często ten, kto trafi celniej pociskiem i szybciej zyskuje przewagę (ale najczęściej preferuje się wykonanie ataku z ukrycia wykorzystując nieprzejrzystość oceanów, aby atak nie został wykryty z powietrza przez samoloty czy drony wroga). Brak wynurzenia okrętu i pozostanie w ukryciu w oceanicznych głębinach chroni je również przed wykryciem radarami.
Wykrycie samolotem jest możliwe dzięki specjalnym bojom sonarowym zrzucanym z powietrza do oceanu. Mowa tu oczywiście o AN/SSQ-125 zrzucanych z pokładu śmigłowców MH-60 Seahawk, samolotów P-3 lub P-8 czy wystrzeliwane z okrętów podwodnych, zaczynają rozkładać się uwalniając ukryty w nich nadajnik znajdujący się na powierzchni wody oraz podwodny punkt nasłuchowy zawierający aż 40 hydrofonów w kształcie pięciokątów. Generują one dźwięki poprzez detonację swoich ładunków wybuchowych (w starszych wersjach) albo z generowanej fali akustycznej (w nowszych modelach). Takie informacje trafiają do okrętów i samolotów odpowiedzialnych za przeszukiwanie ogromnych odległości, co pomaga w podejmowaniu szybkiej reakcji na doniesienia o wrogich okrętach podwodnych. Warto wspomnieć, że gdyby nie boje sonarowe, samoloty nie byłyby w stanie skutecznie wykrywać wrogich okrętów z powietrza (tak zaawansowana jest aktualna technologia marynarki wojennej).
Wykorzystanie sonaru do lokalizowania i unicestwiania miny morskiej:
Oryginalny dźwięk z sonaru łodzi podwodnej podczas II Wojny Światowej:
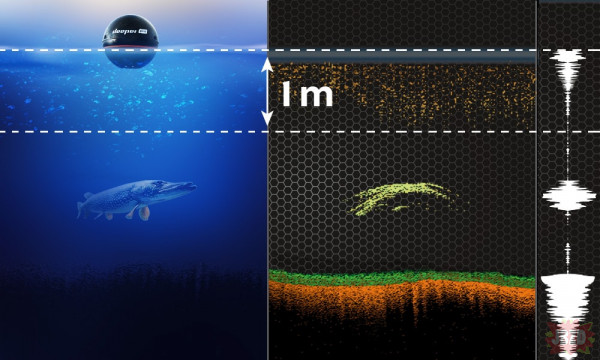
Wykorzystanie sonarów w rybołówstwie i wędkarstwie
System sonarowy używany jest także w rybołówstwie, a także… w wędkarstwie. W obu tych przypadkach ma on za zadanie zlokalizowanie ławic ryb, określenie ich liczebności i odległości, a nawet wielkości ryb, co zwiększa skuteczność połowu. Zazwyczaj wykorzystuje się tutaj sonary przeznaczone do pracy na płytkich wodach (zazwyczaj do 200 m głębokości). Również różnią się one wyglądem od sonarów wojskowych czy wykorzystywanych w badaniach oceanograficznych czy oceanologicznych. Są one również znacznie mniejsze i tańsze. Cenione są zwłaszcza przez pasjonatów, w tym biorących udział w zawodach wędkarskich. Nieco większe modele, niż do użytku personalnego wykorzystuje się w rybołówstwie na kutrach rybackich, co znacząco skraca czas pracy przy jednoczesnym zwiększeniu efektywności połowu.
System sonarowy używany jest także w rybołówstwie, a także… w wędkarstwie. W obu tych przypadkach ma on za zadanie zlokalizowanie ławic ryb, określenie ich liczebności i odległości, a nawet wielkości ryb, co zwiększa skuteczność połowu. Zazwyczaj wykorzystuje się tutaj sonary przeznaczone do pracy na płytkich wodach (zazwyczaj do 200 m głębokości). Również różnią się one wyglądem od sonarów wojskowych czy wykorzystywanych w badaniach oceanograficznych czy oceanologicznych. Są one również znacznie mniejsze i tańsze. Cenione są zwłaszcza przez pasjonatów, w tym biorących udział w zawodach wędkarskich. Nieco większe modele, niż do użytku personalnego wykorzystuje się w rybołówstwie na kutrach rybackich, co znacząco skraca czas pracy przy jednoczesnym zwiększeniu efektywności połowu.
Dodatkowe źródła dla zainteresowanych:
1.https://oceanexplorer.noaa.gov/technology/sonar/sonar.html
2.https://www.kofama.pl/doc/Opis-Dzia%C5%82ania-Systemu-Sonar.pdf
3.https://deepersonar.com/pl/pl_pl/jak-to-dziala/jak-dziala-sonar
4.https://deepersonar.com/pl/pl_pl/jak-to-dziala/jak-czytac-ekran-echosondy
5.https://www.gospodarkamorska.pl/system-sonarowy-dzialajacy-nad-powierzchnia-wody-55923
6.https://echoson.eu/historia-ultrasonografii/
7.https://divediscover.whoi.edu/archives/tools/sonar-singlebeam.html
8.https://divediscover.whoi.edu/history-of-oceanography/the-oceans-as-battlefield-the-development-of-sonar/
9.https://www.valeport.co.uk/product-news/hydrographic-survey-applications-product-range/?gclid=CjwKCAiAy_CcBhBeEiwAcoMRHH-R-tTM-3hSQArjBmNsJiyku-quJwayfluzntdPBAA2G7CTc0F7ARoCg_MQAvD_BwE
10.https://www.researchgate.net/figure/Passive-and-active-SONAR-for-submarine-detection-Passive-the-submarine-on-the-right_fig12_302546326
11.https://dosits.org/people-and-sound/examine-the-earth/map-the-sea-floor/
12.https://exploration.marinersmuseum.org/object/sonar/
13.https://www.marineinsight.com/tech/11-technologies-that-are-used-to-study-and-understand-oceans/
14.https://me.engin.umich.edu/news-events/news/mining-soundwaves-researchers-unlock-new-data-sonar-signals/
15.https://marinescience23.weebly.com/quest-5-ocean--coasts-multibeam-sonar.html
16.https://www.republicworld.com/world-news/us-news/us-navy-sonar-could-be-behind-increased-whale-beachings-in-pacific-study.html
17.https://www.usgs.gov/media/images/split-beam-ek60-sonar-image-bubbles
18.https://www.chip.pl/2022/01/polowanie-na-okrety-podwodne
19.https://polska-zbrojna.pl/home/articleshow/34953?t=Cel-namierzyc-okret-podwodny
20.https://www.hydro-international.com/content/article/teaming-up-for-multibeam-echo-sounder-and-sonar-solutions
21.https://gdmissionsystems.ca/anti-submarine-warfare/hull-mounted-sonar
22.https://www.sciencedirect.com/science/article/abs/pii/S1574954121002363
23.https://www.militaryaerospace.com/computers/article/16713903/lockheed-martin-nets-big-contract-to-continue-upgrading-submarine-sonar-signal-processing
24.https://www.boats.com/on-the-water/sonar-smack-down-traditional-fishfinder-vs-down-looking-scanner-imager-vs-chirp/
25.http://escort-technology.com/pl/wielowiazkowy-sonarowy-system-rybacki-wassp/
26.https://wiadomosciwedkarskie.com.pl/artykul/boczny-sonar--interpretacja/651771
27.http://www.gprsystem.pl/pl/metoda-sonarowa,10055
1.https://oceanexplorer.noaa.gov/technology/sonar/sonar.html
2.https://www.kofama.pl/doc/Opis-Dzia%C5%82ania-Systemu-Sonar.pdf
3.https://deepersonar.com/pl/pl_pl/jak-to-dziala/jak-dziala-sonar
4.https://deepersonar.com/pl/pl_pl/jak-to-dziala/jak-czytac-ekran-echosondy
5.https://www.gospodarkamorska.pl/system-sonarowy-dzialajacy-nad-powierzchnia-wody-55923
6.https://echoson.eu/historia-ultrasonografii/
7.https://divediscover.whoi.edu/archives/tools/sonar-singlebeam.html
8.https://divediscover.whoi.edu/history-of-oceanography/the-oceans-as-battlefield-the-development-of-sonar/
9.https://www.valeport.co.uk/product-news/hydrographic-survey-applications-product-range/?gclid=CjwKCAiAy_CcBhBeEiwAcoMRHH-R-tTM-3hSQArjBmNsJiyku-quJwayfluzntdPBAA2G7CTc0F7ARoCg_MQAvD_BwE
10.https://www.researchgate.net/figure/Passive-and-active-SONAR-for-submarine-detection-Passive-the-submarine-on-the-right_fig12_302546326
11.https://dosits.org/people-and-sound/examine-the-earth/map-the-sea-floor/
12.https://exploration.marinersmuseum.org/object/sonar/
13.https://www.marineinsight.com/tech/11-technologies-that-are-used-to-study-and-understand-oceans/
14.https://me.engin.umich.edu/news-events/news/mining-soundwaves-researchers-unlock-new-data-sonar-signals/
15.https://marinescience23.weebly.com/quest-5-ocean--coasts-multibeam-sonar.html
16.https://www.republicworld.com/world-news/us-news/us-navy-sonar-could-be-behind-increased-whale-beachings-in-pacific-study.html
17.https://www.usgs.gov/media/images/split-beam-ek60-sonar-image-bubbles
18.https://www.chip.pl/2022/01/polowanie-na-okrety-podwodne
19.https://polska-zbrojna.pl/home/articleshow/34953?t=Cel-namierzyc-okret-podwodny
20.https://www.hydro-international.com/content/article/teaming-up-for-multibeam-echo-sounder-and-sonar-solutions
21.https://gdmissionsystems.ca/anti-submarine-warfare/hull-mounted-sonar
22.https://www.sciencedirect.com/science/article/abs/pii/S1574954121002363
23.https://www.militaryaerospace.com/computers/article/16713903/lockheed-martin-nets-big-contract-to-continue-upgrading-submarine-sonar-signal-processing
24.https://www.boats.com/on-the-water/sonar-smack-down-traditional-fishfinder-vs-down-looking-scanner-imager-vs-chirp/
25.http://escort-technology.com/pl/wielowiazkowy-sonarowy-system-rybacki-wassp/
26.https://wiadomosciwedkarskie.com.pl/artykul/boczny-sonar--interpretacja/651771
27.http://www.gprsystem.pl/pl/metoda-sonarowa,10055





