Podwodne wulkany i ich wpływ na oceany oraz klimat
Wiedza
1 r
24

Dzidki, podwodne wulkany różnią się od powierzchniowych tym, że znajdują się przede wszystkich w morzu lub oceanie (wulkany w jeziorach traktowane są więc jako powierzchniowe), a także tworzą się w zatopionych w skorupie ziemskiej szczelinach wulkanicznych, z których tryska magma. Od powierzchniowych rozróżnia je również wielkość słupa wody (koncepcja kolumny wodnej jest to koncepcja takich warstw wody znajdujących się pomiędzy dnem a powierzchnią, które zróżnicowane są pod względem gęstości wody), pod którym się znajdują. Warto podkreślić, że większość wulkanów znajduje się na dnie morskim, podczas gry na powierzchni ilość ta jest znacznie mniejsza. Według danych NASA jest ok. 1,5 miliona podwodnych wulkanów, w tym ok. 75000 wznoszących się na około 1000 m n.p.m., podczas gdy aktywnych naziemnych jest ok. 1500. Ponadto wulkany podwodne są znacznie wyższe, niż te, które spotyka się na powierzchni. Należy wspomnieć, że podwodne wulkany powstają nie tylko w okolicach szczelin pomiędzy płytami tektonicznymi, ale również w okolicach tzw. plam gorąca, czyli stref o anormalnie wysokiej temperaturze w górnej części płaszcza Ziemi. Są to obszary charakteryzujące się niedużym zasięgiem. Doprowadzają do przetopienia skorupy Ziemi i generują ogniska magmy, przez co powstaje nowy wulkan podwodny.

Wulkany podwodne – Skala zjawiska
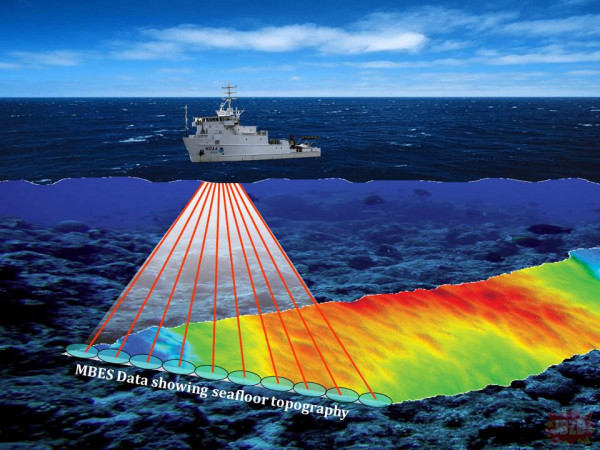
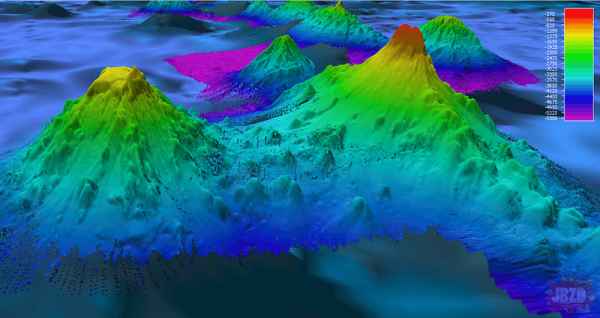
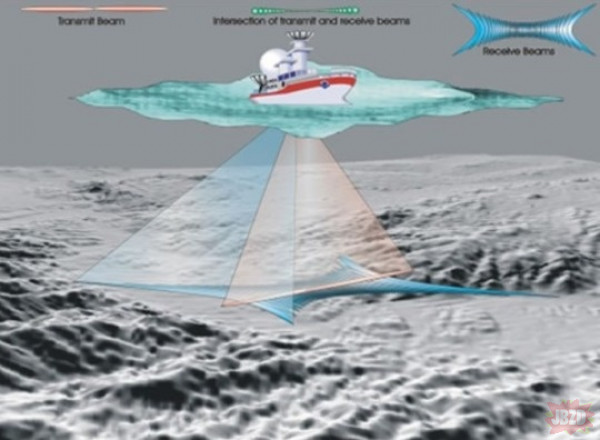
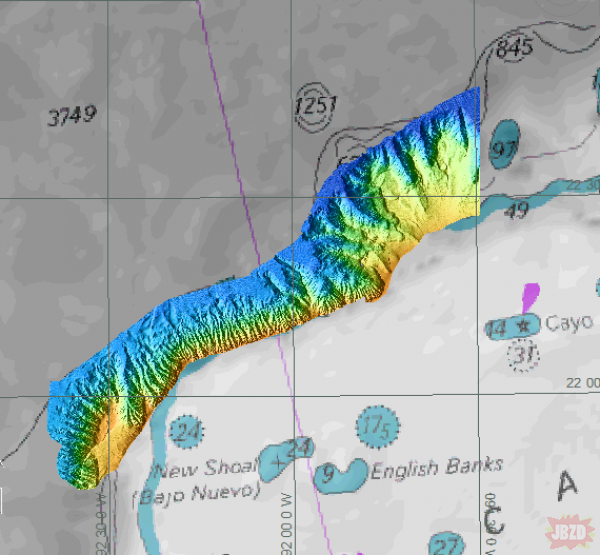
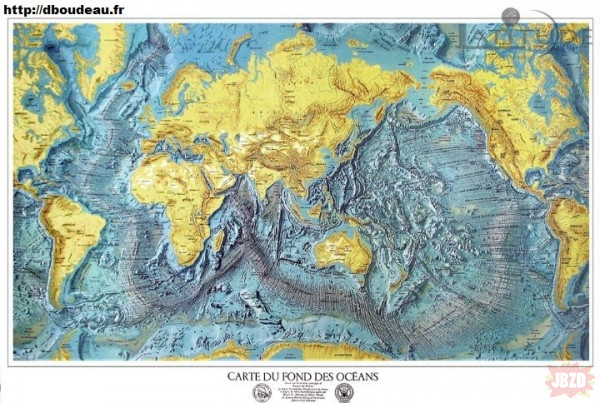
Największą aktywność wulkaniczną rejestruje się w pobliżu tak zwanego Pierścienia Ognia na Oceanie Pacyficznym – jest to obszar o długości ok. 40000 km złożony z pasa rowów oceanicznych i łuków wyspowych, który otacza niemalże cały Ocean Spokojny. Szacuje się, że Pierścień Ognia tworzy w przybliżeniu blisko 450 wulkanów, co sprawia również, że to właśnie w tym obszarze najczęściej rejestruje się trzęsienia ziemi. Z kolei za największy z zarejestrowanych dotąd wulkanów podwodnych uważa się Tamu, który znajduje się w północno-zachodniej części Pacyfiku i posiada średnicę aż 650 km, co sprawia, że swoją wielkością niemalże dorównuje znajdującemu się na Marsie Olympus Mons, co czyni go zarazem największym wulkanem na Ziemi (zarówno pośród podwodnych, jak i naziemnych). Jako ciekawostkę warto wspomnieć, że znacznie więcej aktywnych wulkanów znajduje się pod wodą, a wydzielana podczas erupcji ilość energii jest tak duża, że szacunkowo mogłaby zasilać cały rok domy w USA i Meksyku. Ponadto podwodne wulkany wybuchają na tyle często czy tworzą nowe wyspy w miejscach wysokiej aktywności wulkanicznej, że projekt mapowania dna oceanicznego Seabead 2030 będzie musiał stale dokonywać aktualizacji przy pomocy specjalnych, podwodnych dronów, gdyż dla człowieka będzie to zbyt niebezpieczne.
Największą aktywność wulkaniczną rejestruje się w pobliżu tak zwanego Pierścienia Ognia na Oceanie Pacyficznym – jest to obszar o długości ok. 40000 km złożony z pasa rowów oceanicznych i łuków wyspowych, który otacza niemalże cały Ocean Spokojny. Szacuje się, że Pierścień Ognia tworzy w przybliżeniu blisko 450 wulkanów, co sprawia również, że to właśnie w tym obszarze najczęściej rejestruje się trzęsienia ziemi. Z kolei za największy z zarejestrowanych dotąd wulkanów podwodnych uważa się Tamu, który znajduje się w północno-zachodniej części Pacyfiku i posiada średnicę aż 650 km, co sprawia, że swoją wielkością niemalże dorównuje znajdującemu się na Marsie Olympus Mons, co czyni go zarazem największym wulkanem na Ziemi (zarówno pośród podwodnych, jak i naziemnych). Jako ciekawostkę warto wspomnieć, że znacznie więcej aktywnych wulkanów znajduje się pod wodą, a wydzielana podczas erupcji ilość energii jest tak duża, że szacunkowo mogłaby zasilać cały rok domy w USA i Meksyku. Ponadto podwodne wulkany wybuchają na tyle często czy tworzą nowe wyspy w miejscach wysokiej aktywności wulkanicznej, że projekt mapowania dna oceanicznego Seabead 2030 będzie musiał stale dokonywać aktualizacji przy pomocy specjalnych, podwodnych dronów, gdyż dla człowieka będzie to zbyt niebezpieczne.


Wybuch Hunga Tonga
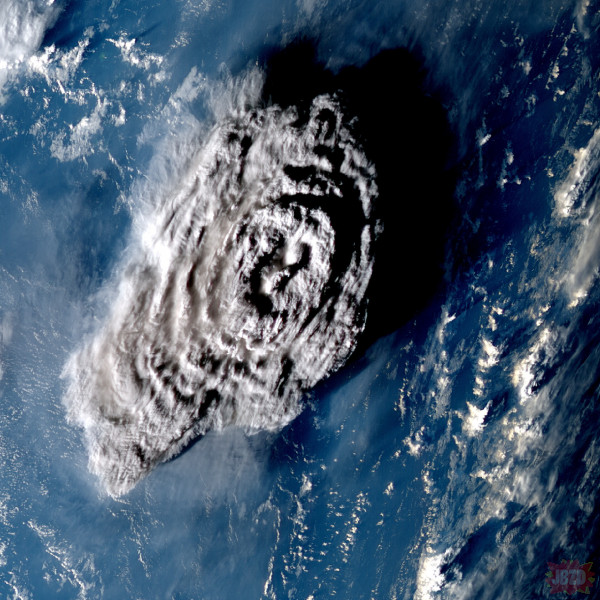
Największą zarejestrowaną dotąd erupcją jest wybuch Hunga Tonga na Oceanie Spokojnym, którego eksplozja została zarejestrowana nawet przez satelity kosmiczne NASA, a efekty jego wybuchu ogrzeją klimat przez najbliższe lata znacznie bardziej, niż działania podejmowane przez całą ludzkość w przeciągu jednego roku. Do stratosfery trafiły ogromne ilości pary wodnej, która jest gazem cieplarnianym, co spowoduje ocieplenie klimatu przez kilka najbliższych lat powodując zaburzenia ocieplania i ochładzania atmosfery (erupcja spowodowała uwolnienie aż 50 milionów ton pary wodnej, przez co w zaledwie 3 dni od erupcji wilgotność atmosfery wzrosła aż o 5% jedynie za sprawą tego pojedynczego wybuchu).
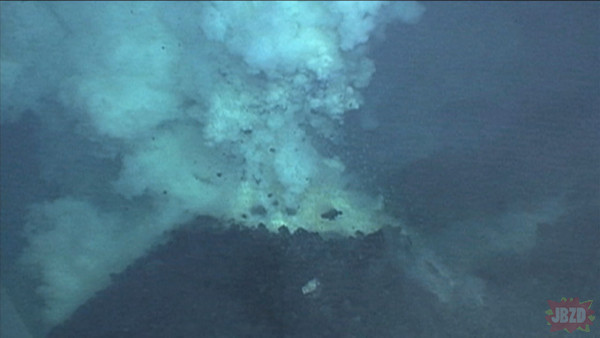
Eksplozja Hunga Tonga była również tak wielka, że pomimo dosyć głęboko osadzonego wulkanu, było go można obserwować na powierzchni – słupy gazów wyrzucanych przez ten podwodny wulkan sięgnęły aż 28 km wysokości. Zazwyczaj, gdy dochodzi do masywnej erupcji do atmosfery trafia przede wszystkim dwutlenek siarki oraz ogromne ilości pyłu wulkanicznego. Cząstki obu mają tendencję do obniżania temperatury na powierzchni Ziemi, bowiem gdy trafią do stratosfery, pozostają tam na długie miesiące i odbijają sporą część padającego na Ziemię promieniowania słonecznego z powrotem w przestrzeń kosmiczną. Warto również zaznaczyć, że w wyniku erupcji Hunga Tonga powstała całkiem nowa wyspa, zaś wielu ludzi na znajdujących się nieopodal wyspach zatruło się wydzielanymi przez wulkan gazami.
Największą zarejestrowaną dotąd erupcją jest wybuch Hunga Tonga na Oceanie Spokojnym, którego eksplozja została zarejestrowana nawet przez satelity kosmiczne NASA, a efekty jego wybuchu ogrzeją klimat przez najbliższe lata znacznie bardziej, niż działania podejmowane przez całą ludzkość w przeciągu jednego roku. Do stratosfery trafiły ogromne ilości pary wodnej, która jest gazem cieplarnianym, co spowoduje ocieplenie klimatu przez kilka najbliższych lat powodując zaburzenia ocieplania i ochładzania atmosfery (erupcja spowodowała uwolnienie aż 50 milionów ton pary wodnej, przez co w zaledwie 3 dni od erupcji wilgotność atmosfery wzrosła aż o 5% jedynie za sprawą tego pojedynczego wybuchu).
Eksplozja Hunga Tonga była również tak wielka, że pomimo dosyć głęboko osadzonego wulkanu, było go można obserwować na powierzchni – słupy gazów wyrzucanych przez ten podwodny wulkan sięgnęły aż 28 km wysokości. Zazwyczaj, gdy dochodzi do masywnej erupcji do atmosfery trafia przede wszystkim dwutlenek siarki oraz ogromne ilości pyłu wulkanicznego. Cząstki obu mają tendencję do obniżania temperatury na powierzchni Ziemi, bowiem gdy trafią do stratosfery, pozostają tam na długie miesiące i odbijają sporą część padającego na Ziemię promieniowania słonecznego z powrotem w przestrzeń kosmiczną. Warto również zaznaczyć, że w wyniku erupcji Hunga Tonga powstała całkiem nowa wyspa, zaś wielu ludzi na znajdujących się nieopodal wyspach zatruło się wydzielanymi przez wulkan gazami.


Jakie czynniki mają wpływ na erupcję podwodnych wulkanów?
Najwięcej podwodnych wulkanów ulokowanych jest w obszarach zwiększonej aktywności tektonicznej (czyli w miejscach subdukcji płyt tektonicznych) oraz w okolicy grzbietów oceanicznych (w tych miejscach płyty tektoniczne się rozsuwają, więc wypływająca spod powierzchni lawa wypełnia luki pomiędzy płytami tworząc kolejne fragmenty grzbietów oceanicznych). Te dwa obszary charakteryzują się największą aktywnością wulkaniczną. Warto zaznaczyć, że podwodne wulkany znajdujące się w płytkiej wodzie mogą wyrzucać materiał w powietrze podczas erupcji. Co ciekawe, do erupcji podwodnych wulkanów dochodzi znacznie częściej, niż naziemnych ze względu na większą bliskość do źródeł magmy – działają podobnie, jak zawory ciśnieniowe, gdyż co jakiś czas uwalniają ciepło o stopioną skałę spod powierzchni Ziemi. Na erupcję podwodnych wulkanów wpływ mają takie czynniki, jak: skład chemiczny magmy, zawartość wody, ciśnienie wewnętrzne oraz inne dotąd niezbadane przez sejsmologów cechy mogą wpływać na gwałtowność erupcji podwodnego wulkanu. Sygnatury chemiczne w schłodzonej lawie mogą również opisywać skład wnętrza Ziemi w czasie erupcji, co może pomóc geologom zrozumieć wewnętrzne funkcjonowanie Ziemi i odległą przeszłość.
Najwięcej podwodnych wulkanów ulokowanych jest w obszarach zwiększonej aktywności tektonicznej (czyli w miejscach subdukcji płyt tektonicznych) oraz w okolicy grzbietów oceanicznych (w tych miejscach płyty tektoniczne się rozsuwają, więc wypływająca spod powierzchni lawa wypełnia luki pomiędzy płytami tworząc kolejne fragmenty grzbietów oceanicznych). Te dwa obszary charakteryzują się największą aktywnością wulkaniczną. Warto zaznaczyć, że podwodne wulkany znajdujące się w płytkiej wodzie mogą wyrzucać materiał w powietrze podczas erupcji. Co ciekawe, do erupcji podwodnych wulkanów dochodzi znacznie częściej, niż naziemnych ze względu na większą bliskość do źródeł magmy – działają podobnie, jak zawory ciśnieniowe, gdyż co jakiś czas uwalniają ciepło o stopioną skałę spod powierzchni Ziemi. Na erupcję podwodnych wulkanów wpływ mają takie czynniki, jak: skład chemiczny magmy, zawartość wody, ciśnienie wewnętrzne oraz inne dotąd niezbadane przez sejsmologów cechy mogą wpływać na gwałtowność erupcji podwodnego wulkanu. Sygnatury chemiczne w schłodzonej lawie mogą również opisywać skład wnętrza Ziemi w czasie erupcji, co może pomóc geologom zrozumieć wewnętrzne funkcjonowanie Ziemi i odległą przeszłość.
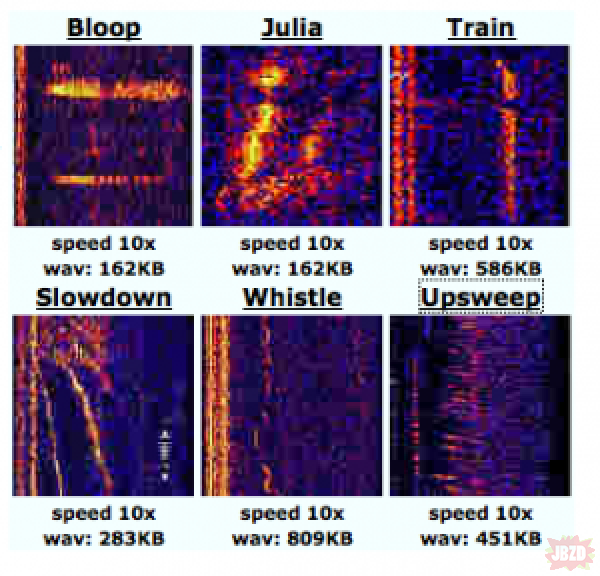
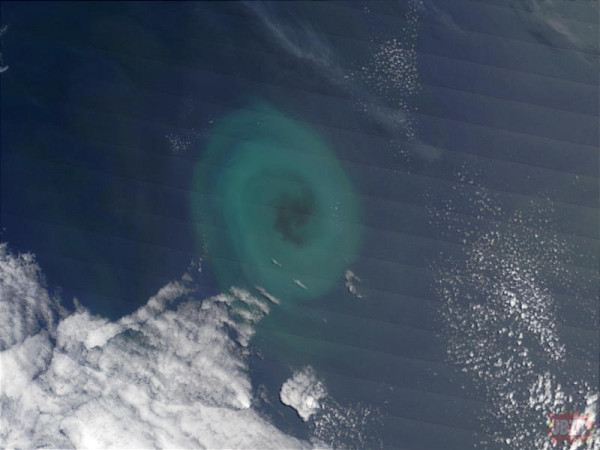
Co ciekawe, im większy jest słup wody w przypadku erupcji podwodnych wulkanów, tym bardziej zmienia się charakterystyka wybuchu. Wyższe przewodnictwo cieplne wody przekształci magmę w szkło znacznie szybciej, niż podczas erupcji ziemi, zaś ciśnienie pod wodą może osiągnąć ponad 250-krotność ciśnienia standardowego ograniczając tym samym znacząco zjawisko bulgotania wybuchowego i reakcję między magmą a wodą morską. Ponadto po zetknięciu z wodą, magma niemalże natychmiastowo zmienia się w warstwę stałą, która zwana jest niekiedy lawą poduszkową. Ponadto erupcje podwodnych wulkanów są trudne do zlokalizowania przez hydrofony (stąd na przykład mimo rejonów wysokiej aktywności wulkanicznej nadal nie ma potwierdzającej teorii w sprawie niezidentyfikowanego dźwięku Upsweep, który po raz pierwszy zarejestrowano w 1991 roku i charakteryzuje się pewną sezonowością – dwa razy do roku).

Pozytywny wpływ erupcji wulkanicznych
Oprócz dobrze znanej siły niszczenia, wulkany są również znaczącym generatorem nowej skorupy planetarnej, a także kanałem dla pierwiastków śladowych i innych materiałów, które wracają na powierzchnię z wnętrza planety. Ponadto tworzą grzbiety oceaniczne w miejscach, gdzie płyty tektoniczne Ziemi rozsuwają się, a także działają jak swoistego rodzaju termoregulator, dzięki któremu nadmiar ciepła pod powierzchnią planety znajduje ujście, co sprzyja utrzymywaniu na niej warunków odpowiednich do życia. Dodatkowo przyczyniają się do powstawania nowych wysp na oceanach – czasami jedna potężna erupcja większego podwodnego wulkanu może w zaledwie jedną dobę utworzyć całą wyspę. Magma, która ma stały dostęp do wody, znacznie szybciej ulega zastygnięciu, niż w przypadku wulkanów naziemnych.
Oprócz dobrze znanej siły niszczenia, wulkany są również znaczącym generatorem nowej skorupy planetarnej, a także kanałem dla pierwiastków śladowych i innych materiałów, które wracają na powierzchnię z wnętrza planety. Ponadto tworzą grzbiety oceaniczne w miejscach, gdzie płyty tektoniczne Ziemi rozsuwają się, a także działają jak swoistego rodzaju termoregulator, dzięki któremu nadmiar ciepła pod powierzchnią planety znajduje ujście, co sprzyja utrzymywaniu na niej warunków odpowiednich do życia. Dodatkowo przyczyniają się do powstawania nowych wysp na oceanach – czasami jedna potężna erupcja większego podwodnego wulkanu może w zaledwie jedną dobę utworzyć całą wyspę. Magma, która ma stały dostęp do wody, znacznie szybciej ulega zastygnięciu, niż w przypadku wulkanów naziemnych.


Zagrożenia wynikające z erupcji podwodnych wulkanów
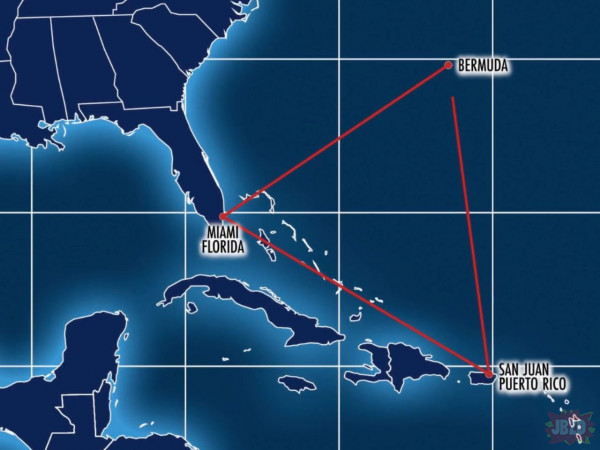
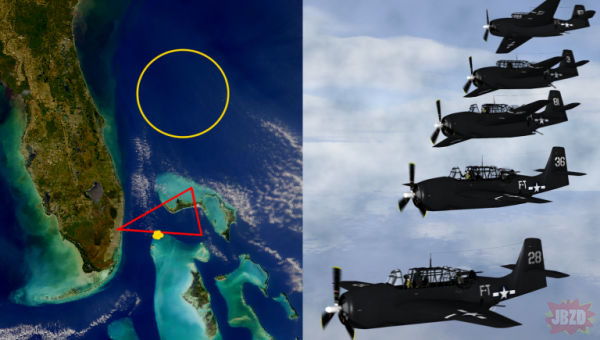
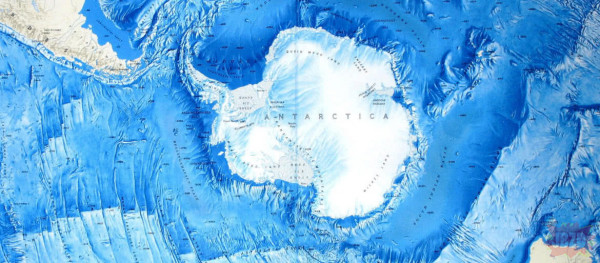
Nieoczekiwane eksplozje podwodnych wulkanów mogą spowodować ogromne straty w oceanicznej faunie i florze, a także przyczynić się do osunięć ziemi w okolicach grzbietów oceanicznych. Ponadto wydostające się z ich kraterów gazy mogą być trujące dla organizmów żywych i mieć niekorzystny wpływ na atmosferę. W przypadku wybuchu większych wulkanów powodują uwolnienie bardzo wysokiej temperatury, która może spowodować nagłe ogrzanie atmosfery i wody. Również częste wybuchy mniejszych wulkanów czy ich skupisk znajdujących się w obszarach o niższej temperaturze (np. wulkany na Antarktydzie) mogą przyczynić się do znacznego ogrzewania atmosfery, a nawet mieć wpływ na powolne topnienie lodowców znajdujących się całe kilometry od miejsca erupcji, co może powodować znaczne zakłócenie klimatów. Ponadto wybuchy są tak głośne, że mogą zdezorientować stworzenia morskie nawigujące przy pomocy fal dźwiękowych, co z kolei powoduje dezorganizację ich wędrówek czy wzbudza niepokój zakłócając ich normalny tryb życia. Dodatkowo to właśnie erupcje podwodnych wulkanów wywołują takie klęski żywiołowe, jak tsunami, a silniejsze nawet trzęsienie ziemi. Zwiększają również zawartość dwutlenku węgla i siarki w wodzie. Ponadto gaz wulkaniczny zawiera między innymi metan, którego stężenie znacznie większe jest w wulkanach podwodnych, zaś jego ulatnianie się ze szczelin może powodować zatonięcia statków (co jest bardzo prawdopodobną przyczyną ich zaginięć w obrębie Trójkąta Bermudzkiego).
Nieoczekiwane eksplozje podwodnych wulkanów mogą spowodować ogromne straty w oceanicznej faunie i florze, a także przyczynić się do osunięć ziemi w okolicach grzbietów oceanicznych. Ponadto wydostające się z ich kraterów gazy mogą być trujące dla organizmów żywych i mieć niekorzystny wpływ na atmosferę. W przypadku wybuchu większych wulkanów powodują uwolnienie bardzo wysokiej temperatury, która może spowodować nagłe ogrzanie atmosfery i wody. Również częste wybuchy mniejszych wulkanów czy ich skupisk znajdujących się w obszarach o niższej temperaturze (np. wulkany na Antarktydzie) mogą przyczynić się do znacznego ogrzewania atmosfery, a nawet mieć wpływ na powolne topnienie lodowców znajdujących się całe kilometry od miejsca erupcji, co może powodować znaczne zakłócenie klimatów. Ponadto wybuchy są tak głośne, że mogą zdezorientować stworzenia morskie nawigujące przy pomocy fal dźwiękowych, co z kolei powoduje dezorganizację ich wędrówek czy wzbudza niepokój zakłócając ich normalny tryb życia. Dodatkowo to właśnie erupcje podwodnych wulkanów wywołują takie klęski żywiołowe, jak tsunami, a silniejsze nawet trzęsienie ziemi. Zwiększają również zawartość dwutlenku węgla i siarki w wodzie. Ponadto gaz wulkaniczny zawiera między innymi metan, którego stężenie znacznie większe jest w wulkanach podwodnych, zaś jego ulatnianie się ze szczelin może powodować zatonięcia statków (co jest bardzo prawdopodobną przyczyną ich zaginięć w obrębie Trójkąta Bermudzkiego).




Sharcano – Wybuch wulkanu zamieszkałego przez rekiny
Omawiając podwodne wulkany, warto również wspomnieć o wulkanie Kavachi, znanym potocznie jako Sharcano, czyli podwodnym wulkanie znajdującym się nieopodal Wysp Salomona, który zasłynął z tego, że wnętrze jego krateru zamieszkiwała duża ilość rekinów różnych gatunków ze względu na panującą tam temperaturę wody. Zamieszkują go dwa gatunku rekinów: żarłacze jedwabiste i rekiny młoty. Wulkan ten jest jednym z aktywniejszych w tamtym rejonie i już nie raz eksplodował. Wybuchy były na tyle silne, że bez problemu zostały zarejestrowane przez NASA. Niestety do tej pory nie wiadomo, co dzieje się z rekinami znajdującymi się wewnątrz krateru lub przed jego wybuchem, ale prowadzone są badania w tym kierunku.
Omawiając podwodne wulkany, warto również wspomnieć o wulkanie Kavachi, znanym potocznie jako Sharcano, czyli podwodnym wulkanie znajdującym się nieopodal Wysp Salomona, który zasłynął z tego, że wnętrze jego krateru zamieszkiwała duża ilość rekinów różnych gatunków ze względu na panującą tam temperaturę wody. Zamieszkują go dwa gatunku rekinów: żarłacze jedwabiste i rekiny młoty. Wulkan ten jest jednym z aktywniejszych w tamtym rejonie i już nie raz eksplodował. Wybuchy były na tyle silne, że bez problemu zostały zarejestrowane przez NASA. Niestety do tej pory nie wiadomo, co dzieje się z rekinami znajdującymi się wewnątrz krateru lub przed jego wybuchem, ale prowadzone są badania w tym kierunku.


Dodatkowe źródła dla zainteresowanych:
1.https://www.national-geographic.pl/artykul/podwodne-wulkany-jak-powstaja-i-gdzie-wystepuja
2.http://laboratoria.net/naturecom/19306.html
3.https://www.focus.pl/artykul/najwieksza-podwodna-erupcja-jaka-zarejestrowano-stworzyla-nowy-wulkan-na-dnie-oceanu
4.https://radaryonline.pl/czy-istnieja-podwodne-wulkany/
5.https://przystaneknauka.us.edu.pl/artykul/najwieksza-erupcja-podwodna-w-historii
6.https://www.whoi.edu/know-your-ocean/ocean-topics/how-the-ocean-works/seafloor-below/volcanoes/
7.https://ocean.si.edu/holding-tank/vents-volcanoes/underwater-volcanic-eruption
8.https://www.dw.com/en/how-does-an-underwater-volcano-form/a-60453856
9.https://theconversation.com/underwater-volcanoes-how-ocean-colour-changes-can-signal-an-imminent-eruption-175408
10.https://www.sciencedirect.com/topics/earth-and-planetary-sciences/submarine-volcano
11.https://www.ocean.washington.edu/story/Underwater_volcano_eruption_captured_by_seafloor_observatory
12.https://pl.frwiki.wiki/wiki/Volcan_sous-marin
13.https://pl.frwiki.wiki/wiki/Colonne_d%27eau
14.https://www.wired.co.uk/article/mapping-the-biggest-ocean-floor-volcanic-eruption
15.https://www.urania.edu.pl/wiadomosci/erupcja-wulkanu-tonga-wplynela-takze-na-kosmos
16.https://divers24.pl/22335-polinezja-wybuch-podwodnego-wulkanu-stworzyl-nowa-wyspe/
17.https://www.chip.pl/2022/01/podwodny-wulkan-wyspa-pacyfik
18.https://www.gospodarkamorska.pl/rybolowstwo-ekologia-tak-wyglada-wybuch-podwodnego-wulkanu-zaglada-na-przestrzeni-25-km-wideo-23760
19.https://oiot.pl/erupcja-podwodnego-wulkanu-tonga-moze-ogrzac-ziemie/
20.https://www.nature.com/articles/d41586-022-01544-y
21.https://spidersweb.pl/2022/09/erupcja-wulkanu-tonga-ogrzewanie-klimatu.html
22.https://spidersweb.pl/2022/05/wybuch-wulkanu-na-tonga-to-najsilniejsza-eksplozja.html
23.https://www.science.org/content/article/massive-undersea-eruption-filled-atmosphere-water
24.https://www.reuters.com/business/environment/tongan-volcano-eruption-unleashed-highest-plume-record-2022-11-03/
25.https://www.space.com/sharkcano-undersea-volcano-satellite-image
26.https://people.com/human-interest/sharkcano-active-pacific-ocean-volcano-where-sharks-live-in-acidic-water-erupts-nasa/
1.https://www.national-geographic.pl/artykul/podwodne-wulkany-jak-powstaja-i-gdzie-wystepuja
2.http://laboratoria.net/naturecom/19306.html
3.https://www.focus.pl/artykul/najwieksza-podwodna-erupcja-jaka-zarejestrowano-stworzyla-nowy-wulkan-na-dnie-oceanu
4.https://radaryonline.pl/czy-istnieja-podwodne-wulkany/
5.https://przystaneknauka.us.edu.pl/artykul/najwieksza-erupcja-podwodna-w-historii
6.https://www.whoi.edu/know-your-ocean/ocean-topics/how-the-ocean-works/seafloor-below/volcanoes/
7.https://ocean.si.edu/holding-tank/vents-volcanoes/underwater-volcanic-eruption
8.https://www.dw.com/en/how-does-an-underwater-volcano-form/a-60453856
9.https://theconversation.com/underwater-volcanoes-how-ocean-colour-changes-can-signal-an-imminent-eruption-175408
10.https://www.sciencedirect.com/topics/earth-and-planetary-sciences/submarine-volcano
11.https://www.ocean.washington.edu/story/Underwater_volcano_eruption_captured_by_seafloor_observatory
12.https://pl.frwiki.wiki/wiki/Volcan_sous-marin
13.https://pl.frwiki.wiki/wiki/Colonne_d%27eau
14.https://www.wired.co.uk/article/mapping-the-biggest-ocean-floor-volcanic-eruption
15.https://www.urania.edu.pl/wiadomosci/erupcja-wulkanu-tonga-wplynela-takze-na-kosmos
16.https://divers24.pl/22335-polinezja-wybuch-podwodnego-wulkanu-stworzyl-nowa-wyspe/
17.https://www.chip.pl/2022/01/podwodny-wulkan-wyspa-pacyfik
18.https://www.gospodarkamorska.pl/rybolowstwo-ekologia-tak-wyglada-wybuch-podwodnego-wulkanu-zaglada-na-przestrzeni-25-km-wideo-23760
19.https://oiot.pl/erupcja-podwodnego-wulkanu-tonga-moze-ogrzac-ziemie/
20.https://www.nature.com/articles/d41586-022-01544-y
21.https://spidersweb.pl/2022/09/erupcja-wulkanu-tonga-ogrzewanie-klimatu.html
22.https://spidersweb.pl/2022/05/wybuch-wulkanu-na-tonga-to-najsilniejsza-eksplozja.html
23.https://www.science.org/content/article/massive-undersea-eruption-filled-atmosphere-water
24.https://www.reuters.com/business/environment/tongan-volcano-eruption-unleashed-highest-plume-record-2022-11-03/
25.https://www.space.com/sharkcano-undersea-volcano-satellite-image
26.https://people.com/human-interest/sharkcano-active-pacific-ocean-volcano-where-sharks-live-in-acidic-water-erupts-nasa/